3.8 Une nouvelle motorisation
Enfin, le chapitre concernant la nouvelle motorisation du pont Frateschi pour se débarrasser de la lenteur et du bruit infernal ! Et ajouter du réalisme : jusqu’à 32 voies de sorties avec un angle de 11¼ º, un déplacement à 2 tours minute réglable et une vitesse de freinage pour s’arrêter devant la voie de sortie.
Ce chapitre est facultatif, vous pouvez rester avec la motorisation de base de votre Frateschi ou de votre plaque tournante. Même si pour un cout très modique de 75 € de kit et quelques euros d’adaptations il est possible d’avoir un moteur digne des produits à 500 € et au-délà !.
Merci de lire l’intégralité du tutoriel et de la documentation du kit avant de commencer votre motorisation. Ce tutoriel reste une approche possible et n’est absolument pas industriel. Aucune garantie sur le résultat final !
Le kit de base est réalisé par Locomotech et il est prévu pour les plaques tournantes Peco LK-55. Sa référence est TTMRKE :
Le kit est constitué d’un moteur DC de 12V de 2 RPM, d’un système de fixation, d’une platine de contrôle, d’un capteur d’indexation et d’une plaque pour l’indexation.
La platine de contrôle permet de sélectionner le sens de rotation puis de démarrer le mouvement de rotation avec un signal de démarrage. La plaque tourne alors jusqu’à la prochaine voie de sortie où elle va s’arrêter automatiquement sauf si le signal de démarrage est toujours présent.
Pour l’indexation, le mécanisme utilise un disque avec des fentes et une cellule photoélectrique qui envoie un petit faisceau lumineux à travers les fentes pour envoyer un signal d’arrêt à la carte de contrôle.
Le disque est prédécoupé à 11¼ º, ce qui permet 32 voies de sorties. Pour condamner une voie de sortie, il suffit de masquer la fente correspondante.
Le kit est alimenté par du 16 V CA que j’ai pris sur mon transformateur 12DC/5DC/16AC de chez Faller. Il peut être alimenté en 12 V DC mais je n’ai pas fait l’essai.
Lors de la commande du kit, j’ai précisé que je voulais un axe M3 pour qu’il se fixe directement à la partie mobile du pont en lieux et place de la vis de fixation. A noter que l’axe lui même n’est pas dans le kit, je suis allée l’acheter chez Castorama, c’est vendu au mètre.
Attention à bien préciser cette information de diamètre de l’axe en fonction de votre pont tournant. Locomotech utilise la notation métrique internationale pour le filetage (M3 est un diamètre de 3 mm) pour le pas de vis.
La platine de contrôle peut être facilement connectée à un M84, une sortie est utilisée pour envoyer le signal de démarrage de la rotation et une sortie est utilisée pour changer le sens de rotation (avec un relais 2RT à prévoir en plus). Elle présente aussi deux potentiomètres pour régler la vitesse de rotation et la vitesse de freinage devant une voie d’accès.

Passons au montage mécanique de l’ensemble.
Le kit doit être adapté car je souhaite un ensemble démontable sans fixation sur le plateau lui même. Et je souhaite conserver le portique d’alimentation existant avec les deux frotteurs.
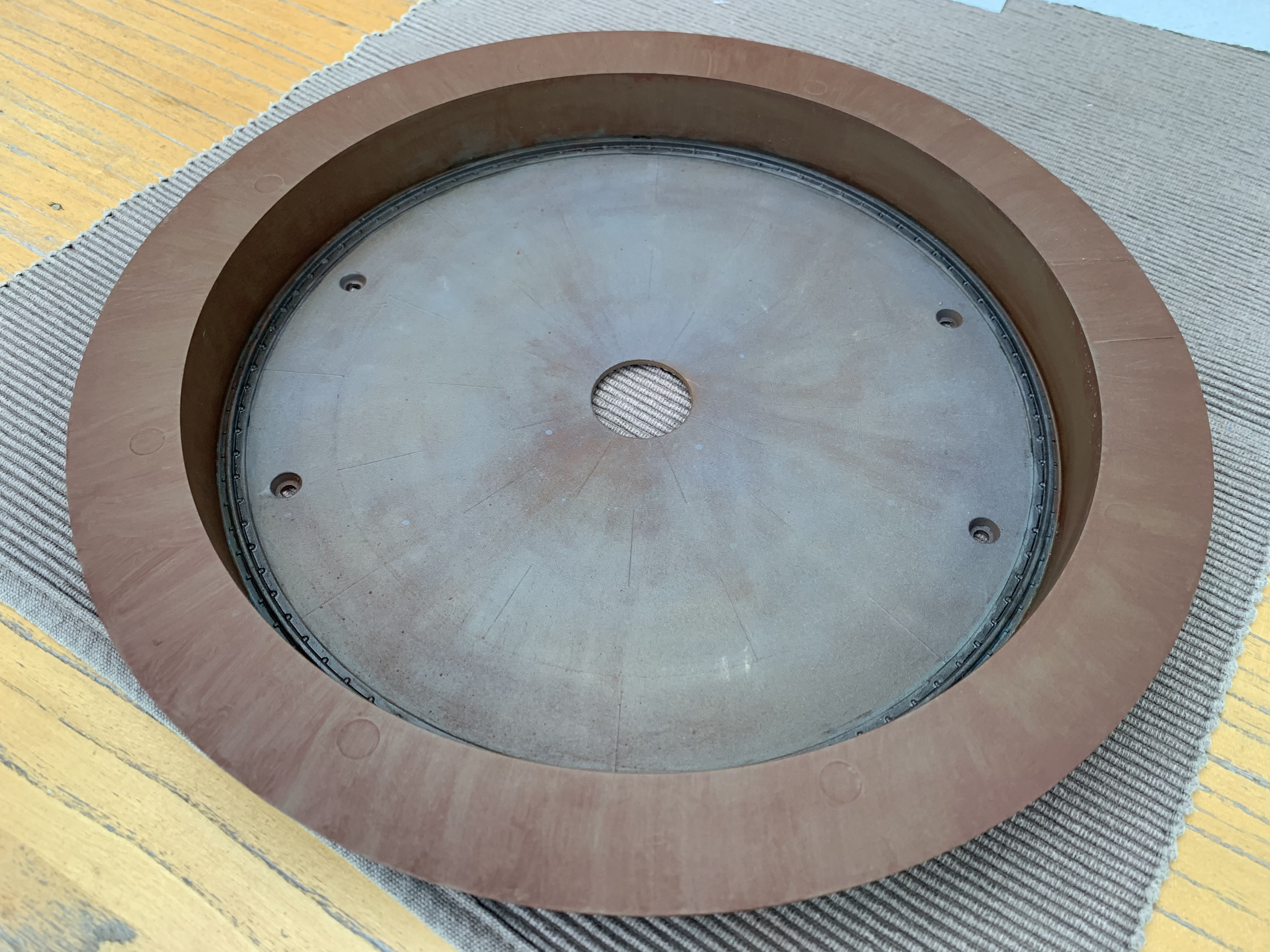
Pour rappel, voici le dessous du pont frateschi avec son moteur et ses roues crantrées. Nous avions déjà modifié les deux frotteurs pour l’alimentation du pont :
La première opération consiste à supprimer le moteur et les deux engrenages :

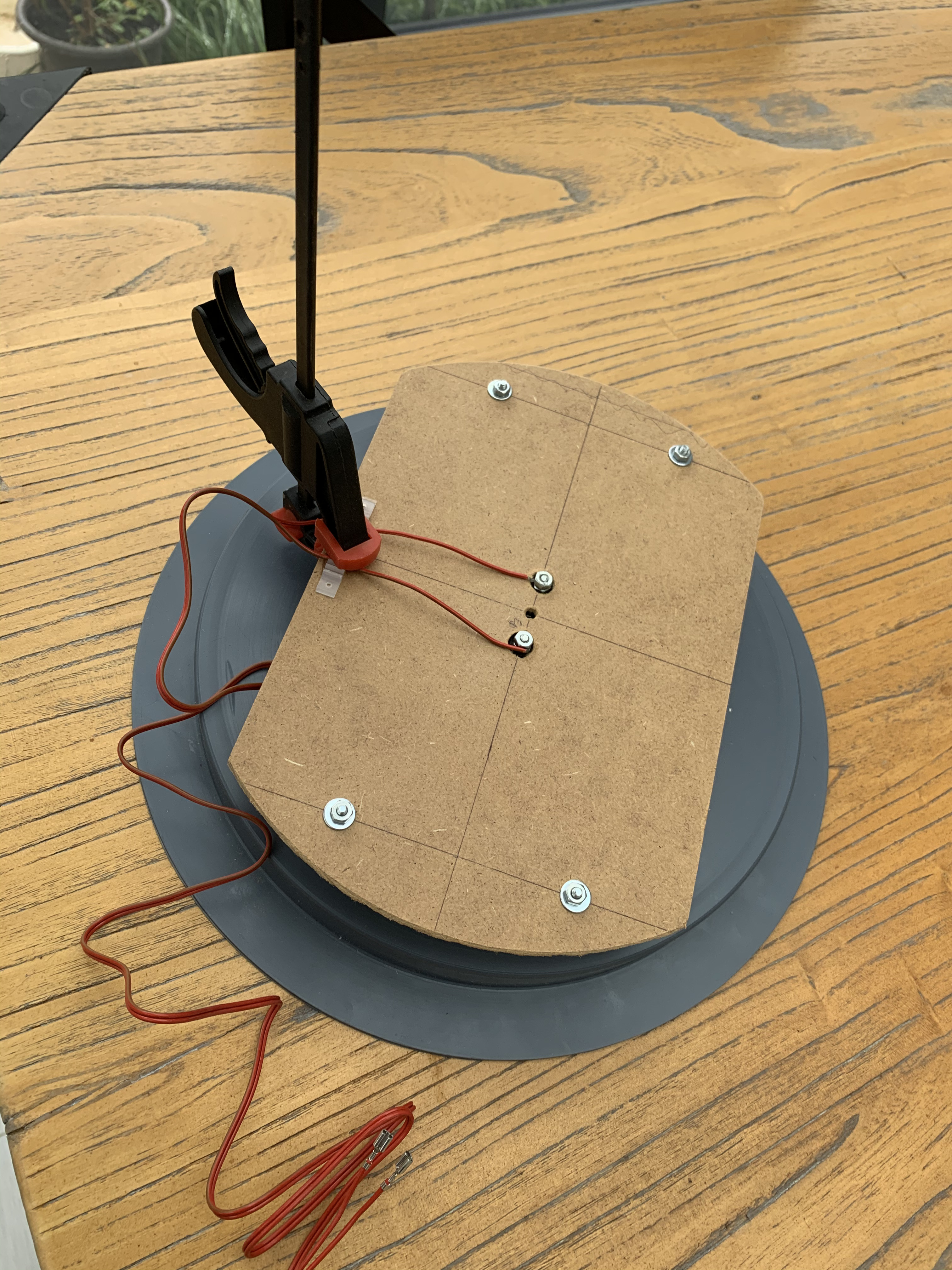
L’étape suivante va consister à créer un plancher qui permettra de fixer le système d’indexation et le moteur. On utilise le diamètre du plateau (24 cm) et j’utilise une planche de récupération en MDF 3 mm :

Et on va fixer ce plancher avec les fixations existantes des quatre pieds de la structure qui porte les deux frotteurs d’alimentation et on va récupérer les deux fils d’alimentation brun et rouge :
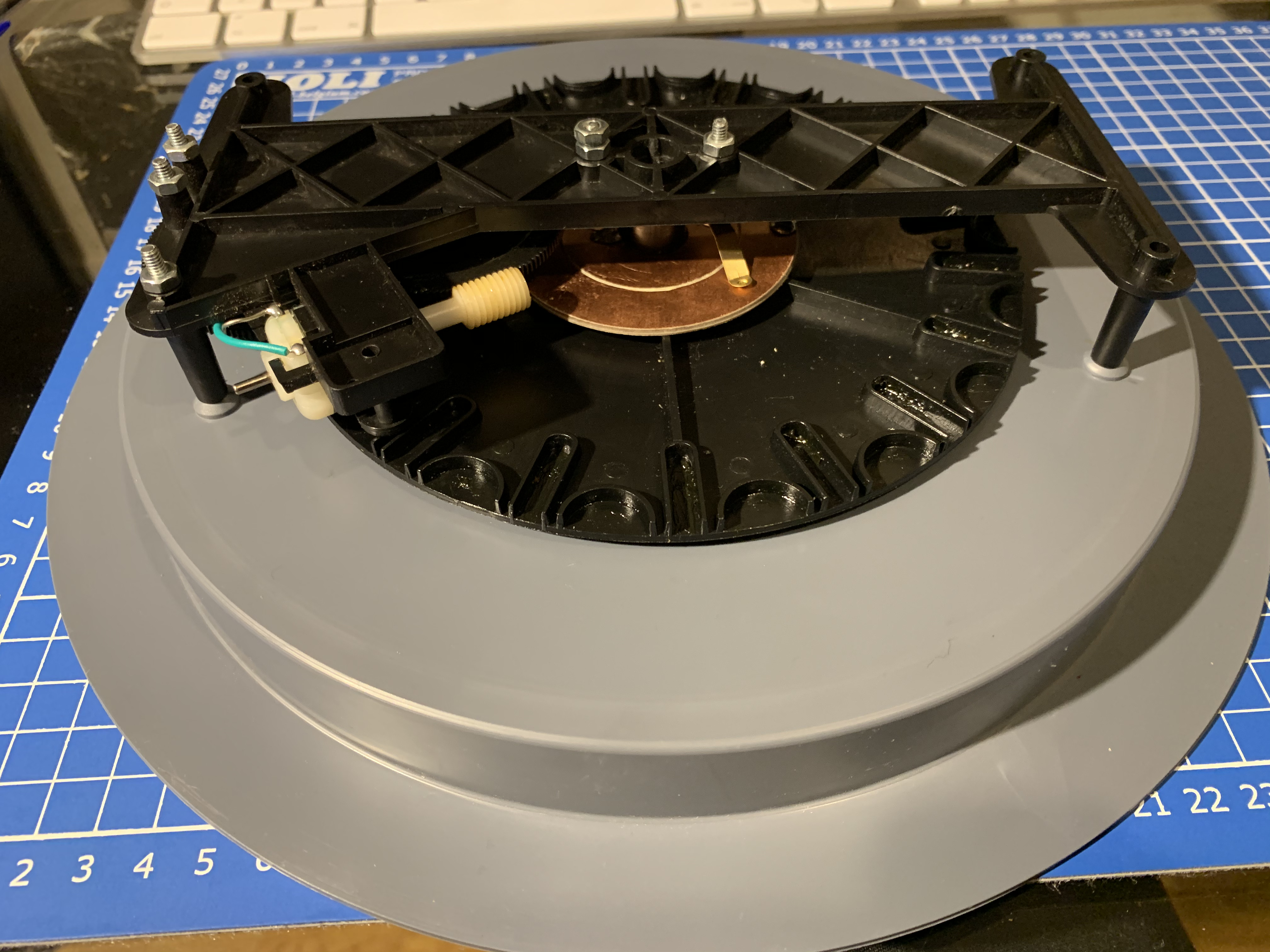
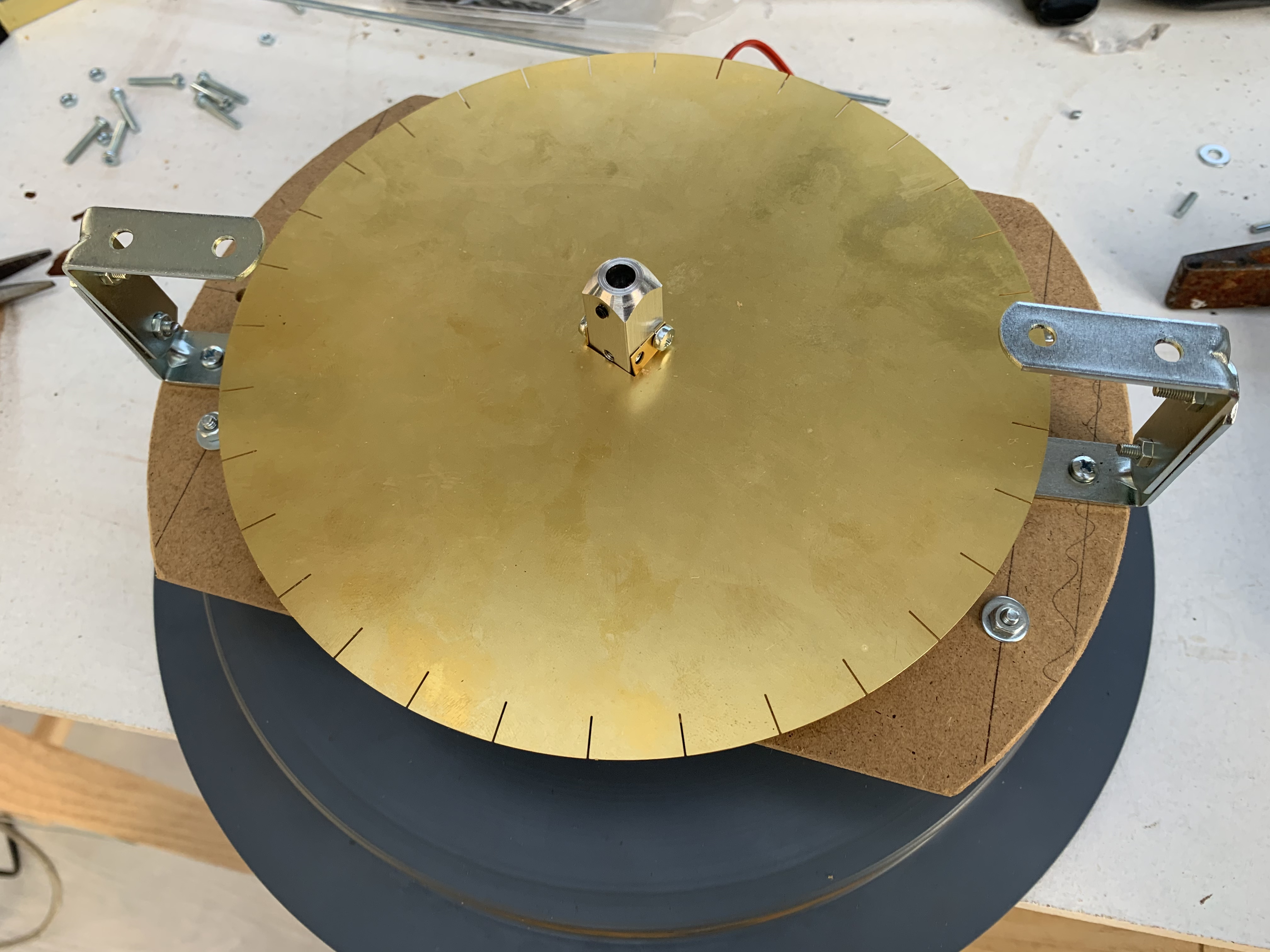
Une simulation de la fixation du kit va me montrer que le montage prévu par Locomotech ne peut pas fonctionner, ce bras flexible va être compliqué à fixer :
On voit néanmoins l’ensemble prendre forme, et notamment le disque avec les fentes et la cellule photoélectrique de détection.
J’ai fait appel à un ami particulièrement doué pour ce genre de problème. Il m’a proposé de mettre des équerres avec un plat en aluminium en lieu et place de ce bras flexible.
En attendant que je retourne chez Castorama pour acheter ce plat alu, j’en ai profité pour peindre la cuve : apprêt en bombe Prince Auguste gris, et différentes couleurs, puis patine :
Puis arrivé des éléments manquant : le plat alu et de la visserie :

Pour découper le plat alu comme le bras flexible ainsi que les fixations sur le moteur. Les gros doigts ne sont pas les miens mais ceux de mon ami qui est venu me donner un coup de main dans cette phase un peu délicate :
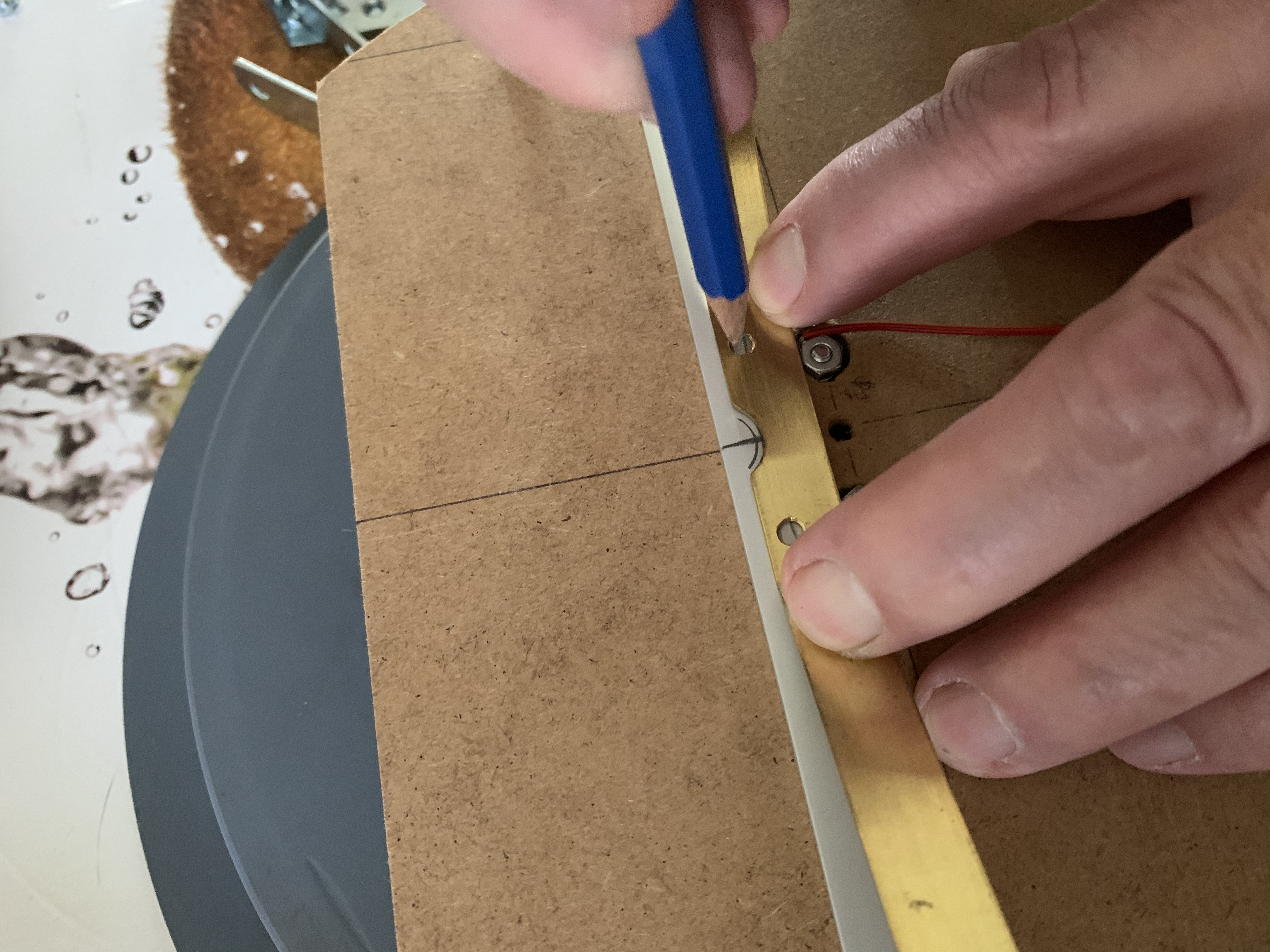
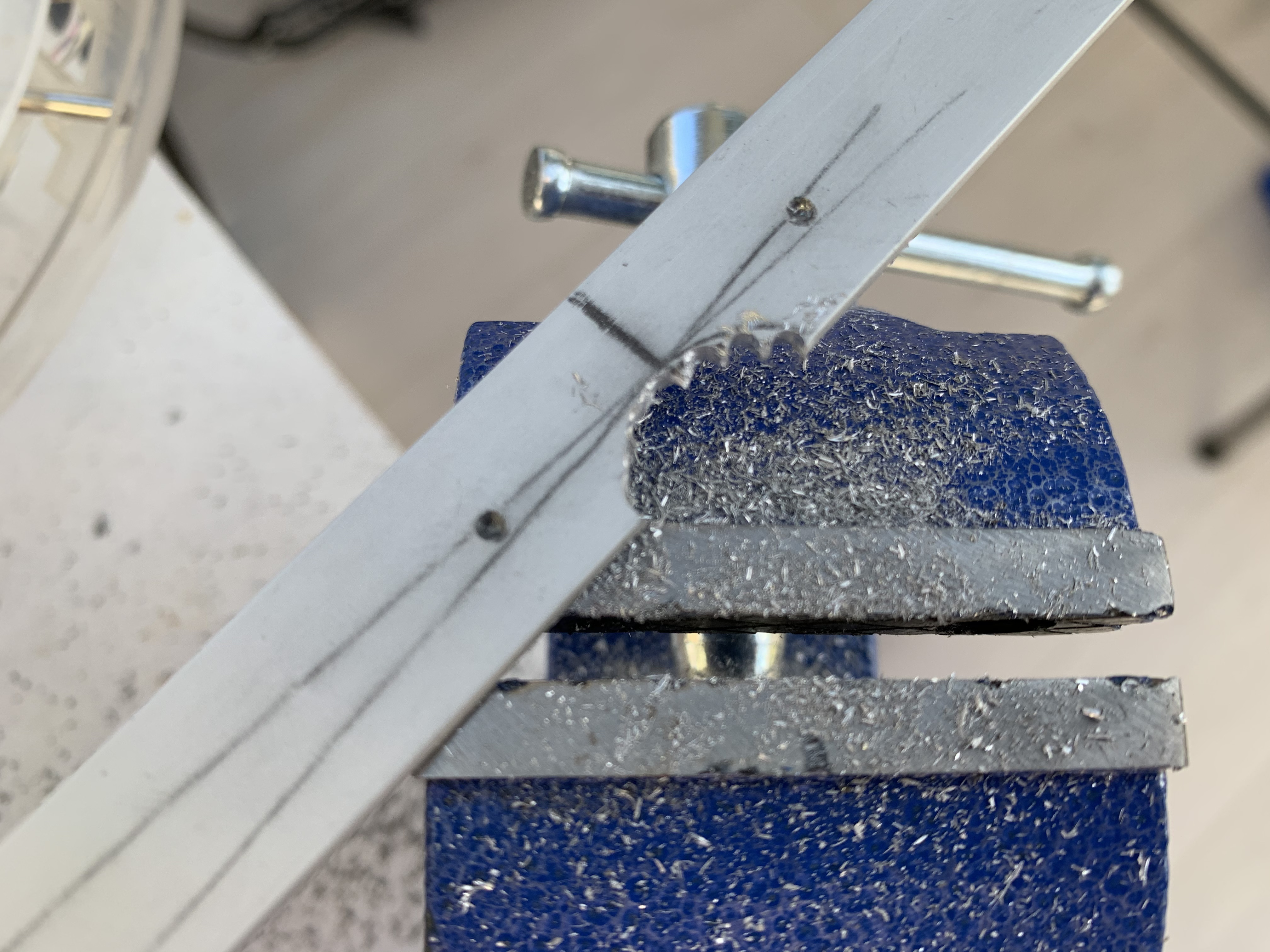
J’ai récupéré la pièce marquée et je suis passée à la découpe. Comme je n’avais pas d’outils adapté, j’ai réalisé des poinçonnages puis des perçages puis un ponçage, le tout avec la Dremel :


Voici le résultat final avec la pièce montée sur le moteur :

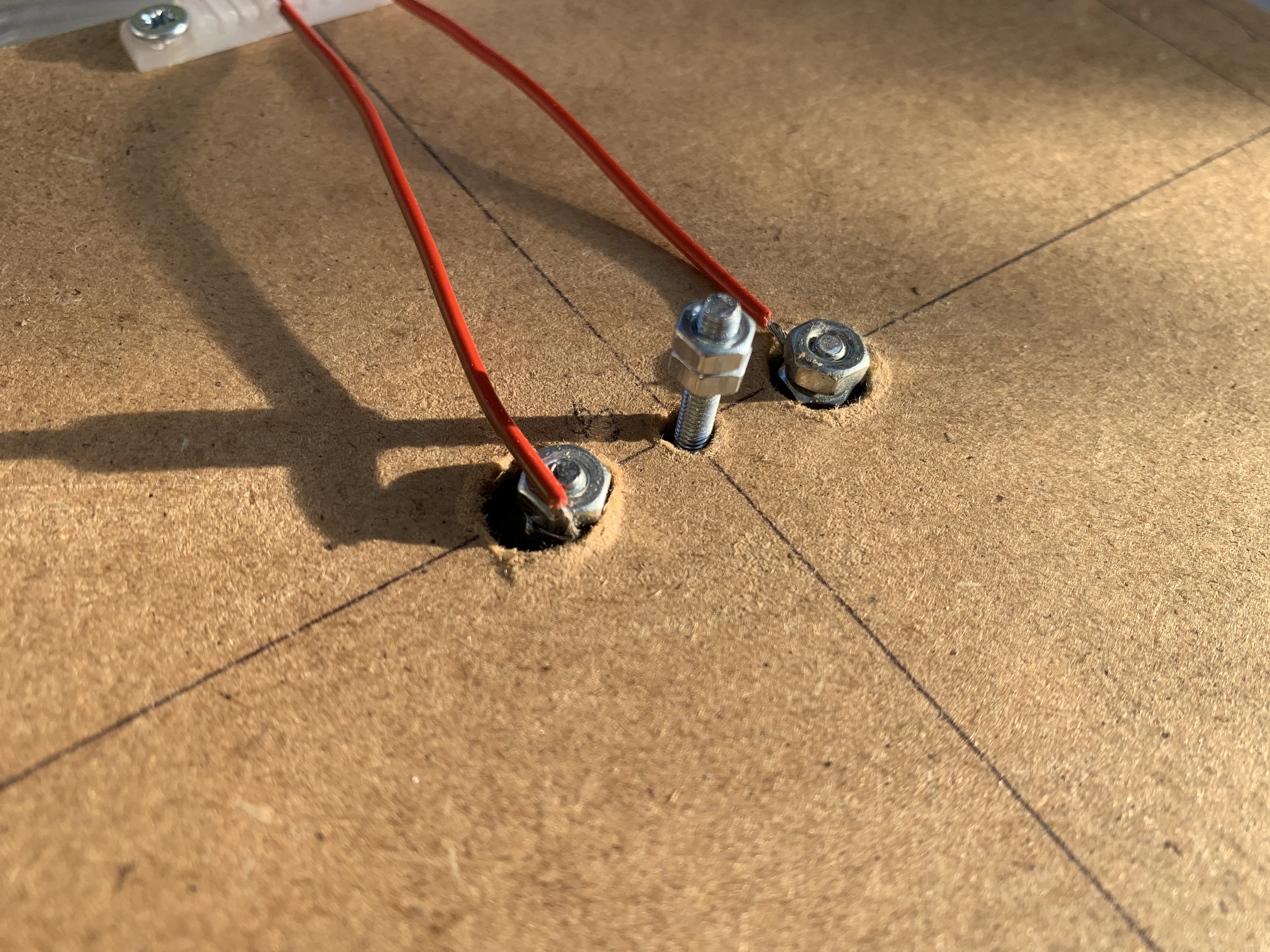
Puis j’installe l’axe de rotation. Pour le visser dans le pas de vis existant du plateau, j’utilise une astuce de mon ami : avec deux boulons :
Vérification de la hauteur - il manque 2 cm - je recommence un nouvel axe :
J’ai oublié de préciser, pour couper l’axe j’utilise une fonction de ma pince à sertir - version cosse automobile, on peut visser un diamètre M3 et couper :

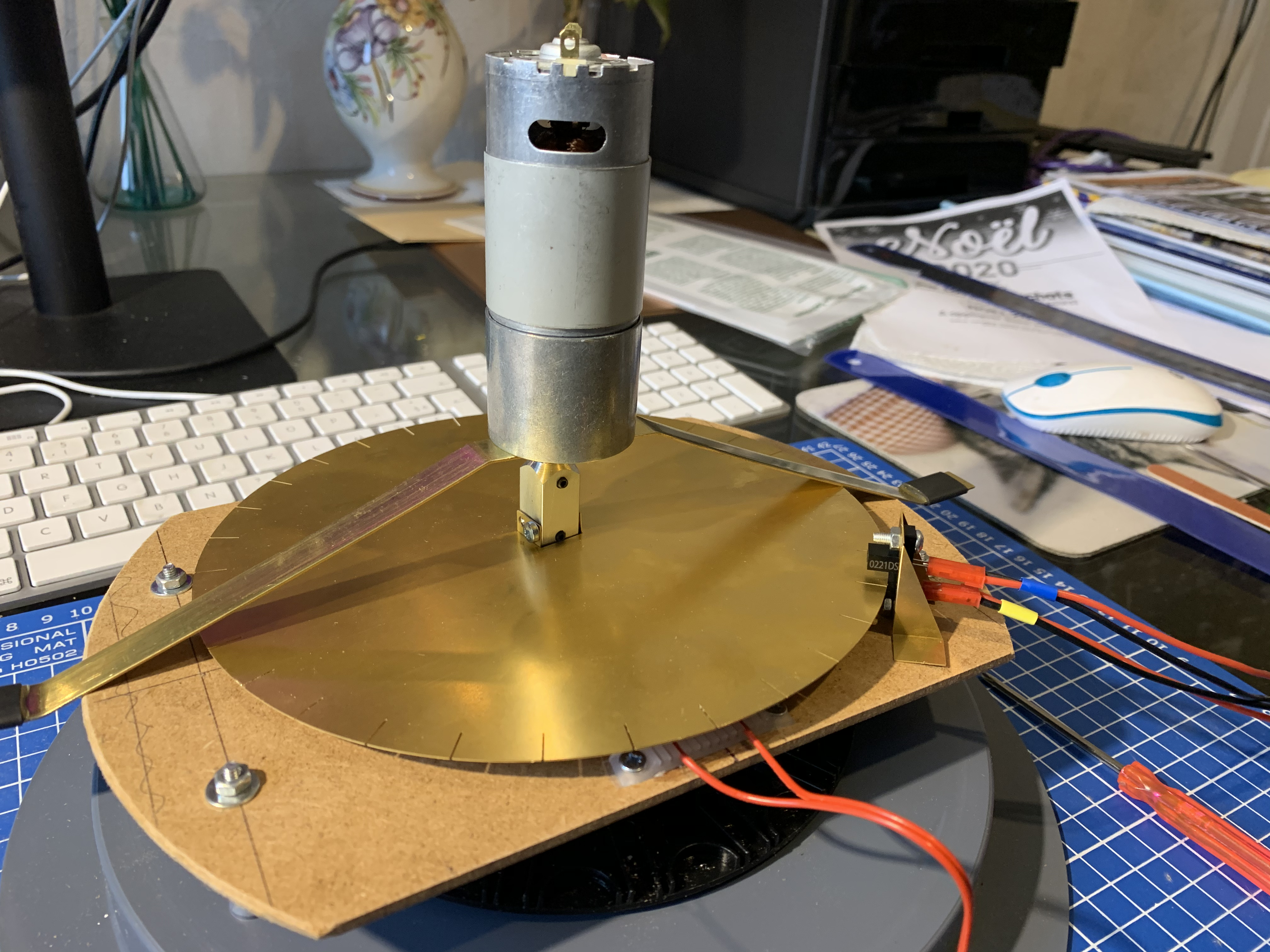
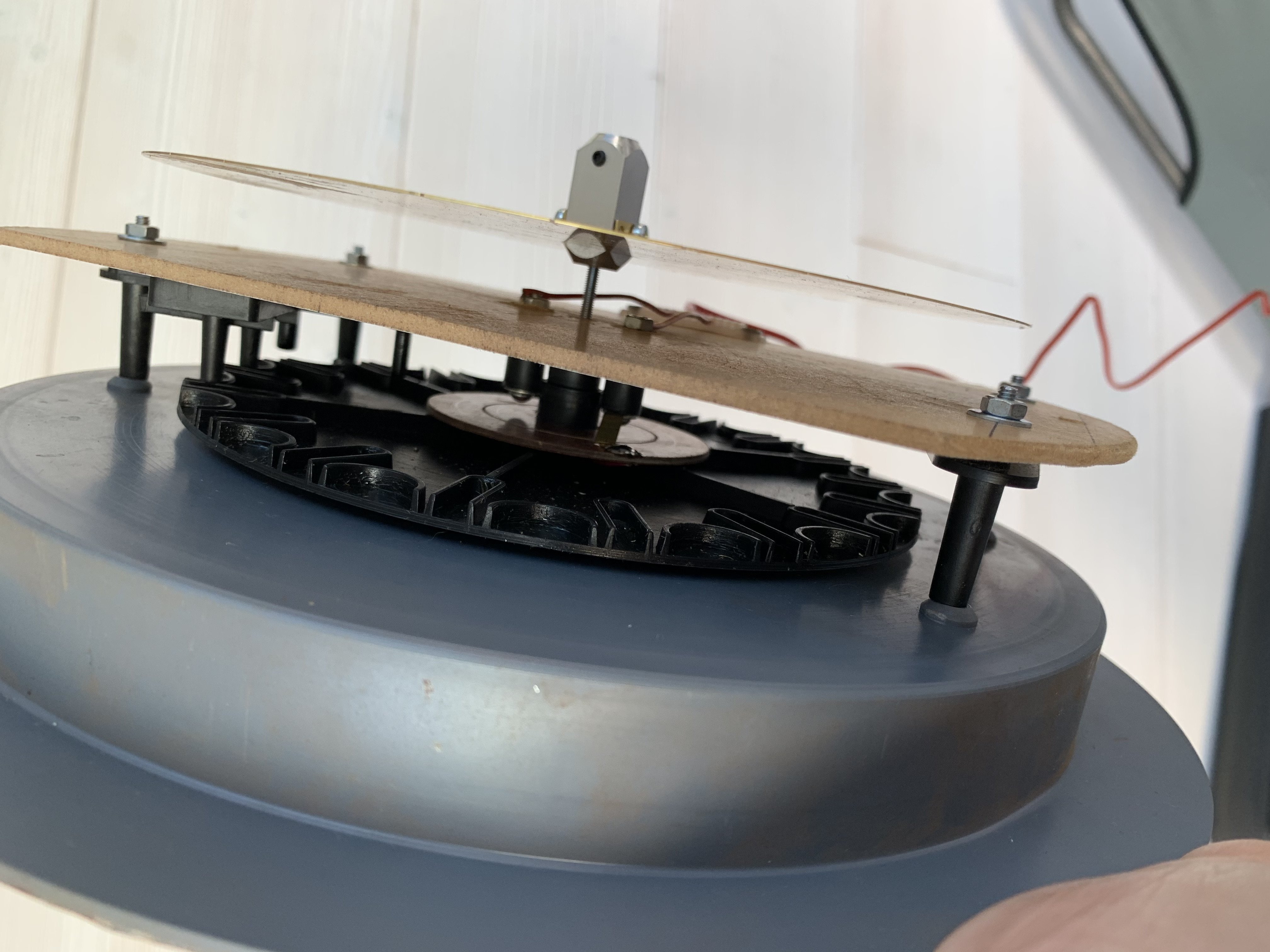
Ce coup ci c’est bon, il est temps d’installer les équerres qui vont supporter le plat alu et son moteur :
Mon ami me conseille de rajouter un silentbloc ou amortisseur (un bout de plastique) pour laisser de la flexibilité à l’ensemble.
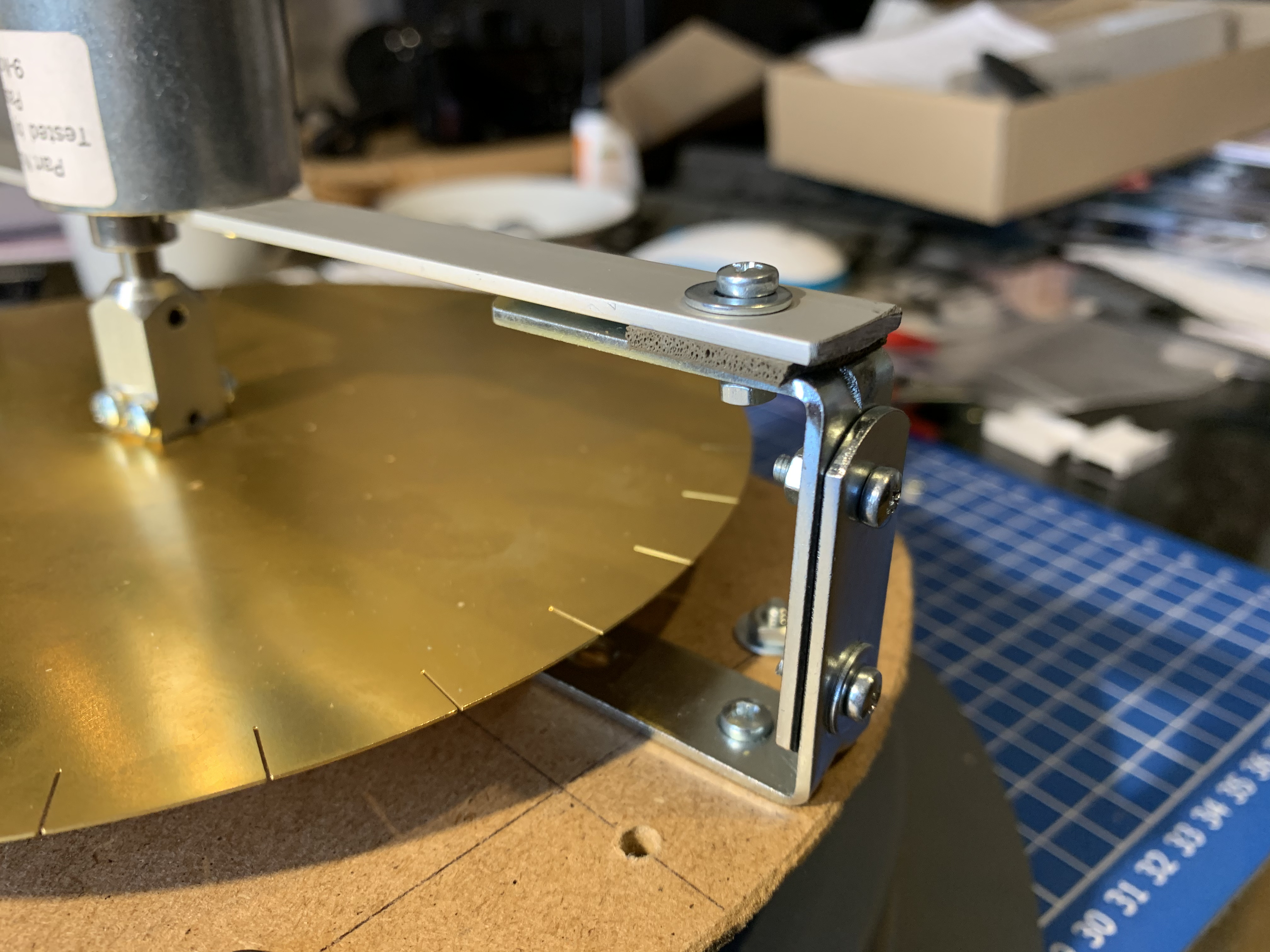
Le plat alu est beaucoup plus rigide que le système de fixation Locomotech. Il est donc important de laisser un certain jeu dans l’assemblage des éléments plancher - équerres - plat - moteur. Je le fais au niveau de la fixation équerres - plat avec le silentbloc et une fixation pas serrée du tout (mais sécurisé par un double écrou).
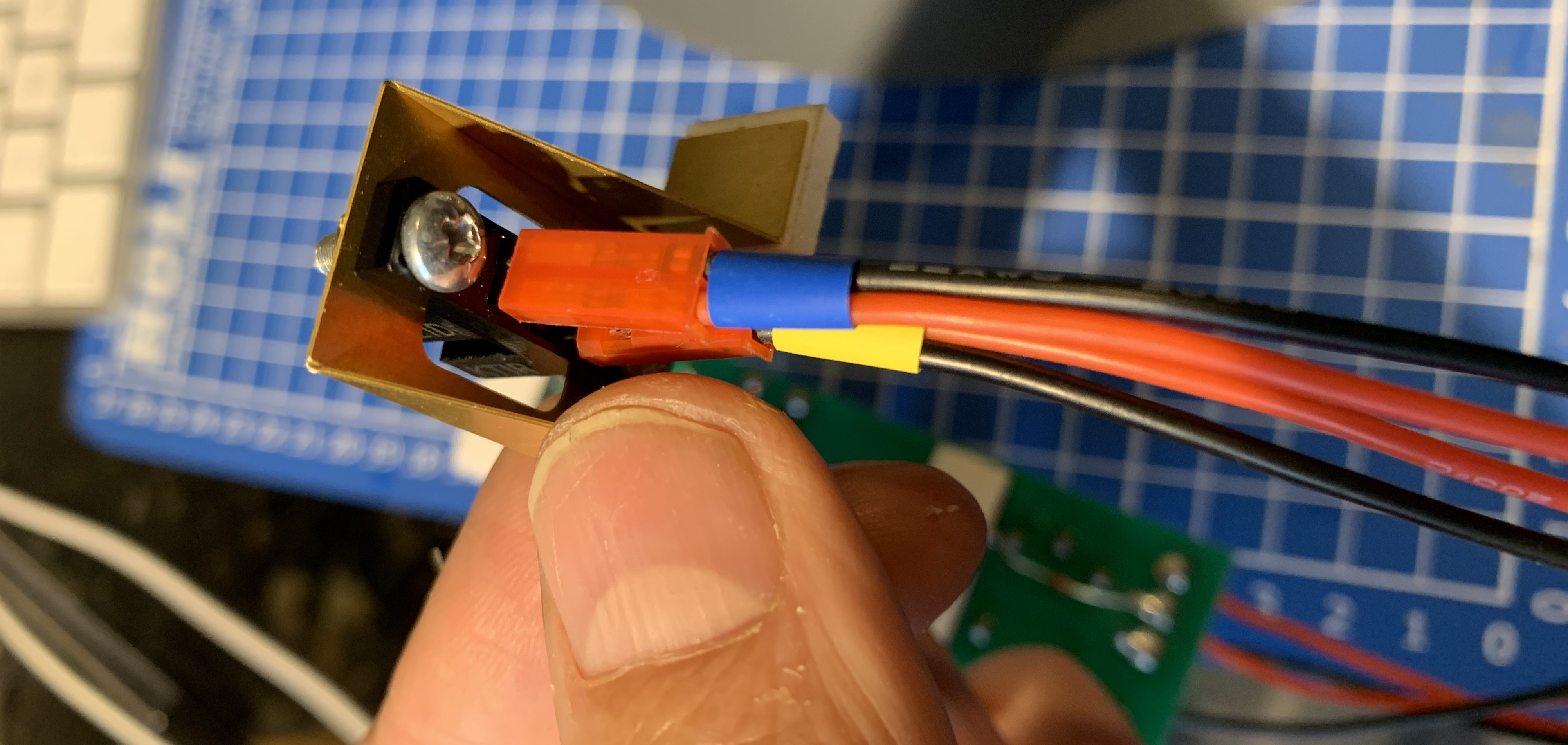
Il reste à fixer le capteur comme indiqué sur la documentation. Comme nous avons vérifié sa position plusieurs fois, notamment la bonne hauteur du disque d’indexation, l’opération consiste juste à le positionner et à le fixer avec le double face.
Voilà. Le montage est terminé. Il est temps de mettre le pont remotorisé en place :
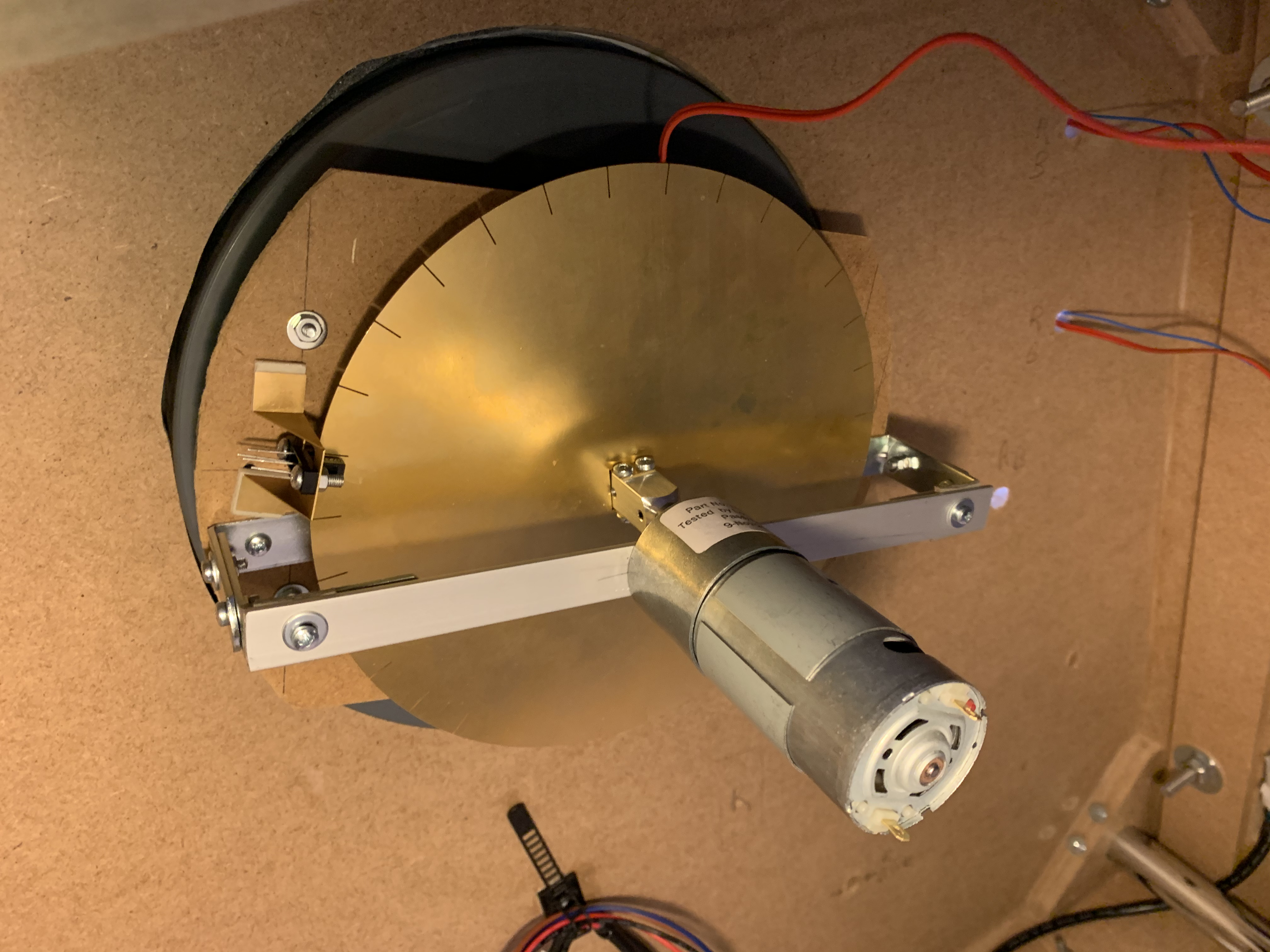
Puis de procéder aux branchements de la platine de contrôle :
- les deux sorties du moteur vers le relais 2RT commandé par une sortie du M84,
- les deux entrées du signal de démarrage du pont connectées avec une sortie du M84,
- les deux entrées d’alimentation 16V AC connectées avec mon transfo Faller.
Puis le branchement du capteur sans se tromper de sens - la documentation du kit est utile :). J’avais repéré avec une photo au préalable :
That’s all !
Essai direct et ça marche.
J’ai fais une petite vidéo. On appréciera le silence, la vitesse constante, le clac du relais du M84 qui commande l’arrêt, et le clac du relais de la platine de contrôle qui détecte chaque voie d’accès :
motorisation d'un pont Frateschi (ou de toute autre plaque tournante non motorisée)")
(Si vous voulez vraiment comparer avec l’ancienne motorisation, c’est sur ce lien - attention les oreilles)
A suivre …