Il y a eu plusieurs échanges sur le forum concernant la Mobile Station 2 (MS2) qui peuvent laisser à penser que cette commande est trop limitée pour un réseau un peu sérieux, et qu’il faut nécessairement passer à une CS2 voir une CS3 (je parle pour le full digital bien évidemment).
Je trouve personnellement que cette console est adaptée pour la conduite d’une locomotive et très adaptée pour changer des paramètres (CVs) mais pas du tout adaptée pour commander les solénoïdes.
Pour rappel, mon objectif à moyen terme est de piloter mon réseau avec un logiciel (dont le choix n’est pas encore fait).
Là aussi, après quelques échanges sur le forum à ce sujet, je suis convaincue que la Digibox qui est livrée avec la MS2 est tout à fait apte à établir une connexion fiable entre un logiciel (Rocrail ou iTrain) et le réseau.
Je viens de franchir ce matin (entre deux visites à Trainsmania) une première étape en ce sens puisque je viens de connecter un périphérique à la Digibox pour piloter mes solénoïdes.
Je vous présente le CAN-StellPult (120€ environ) :
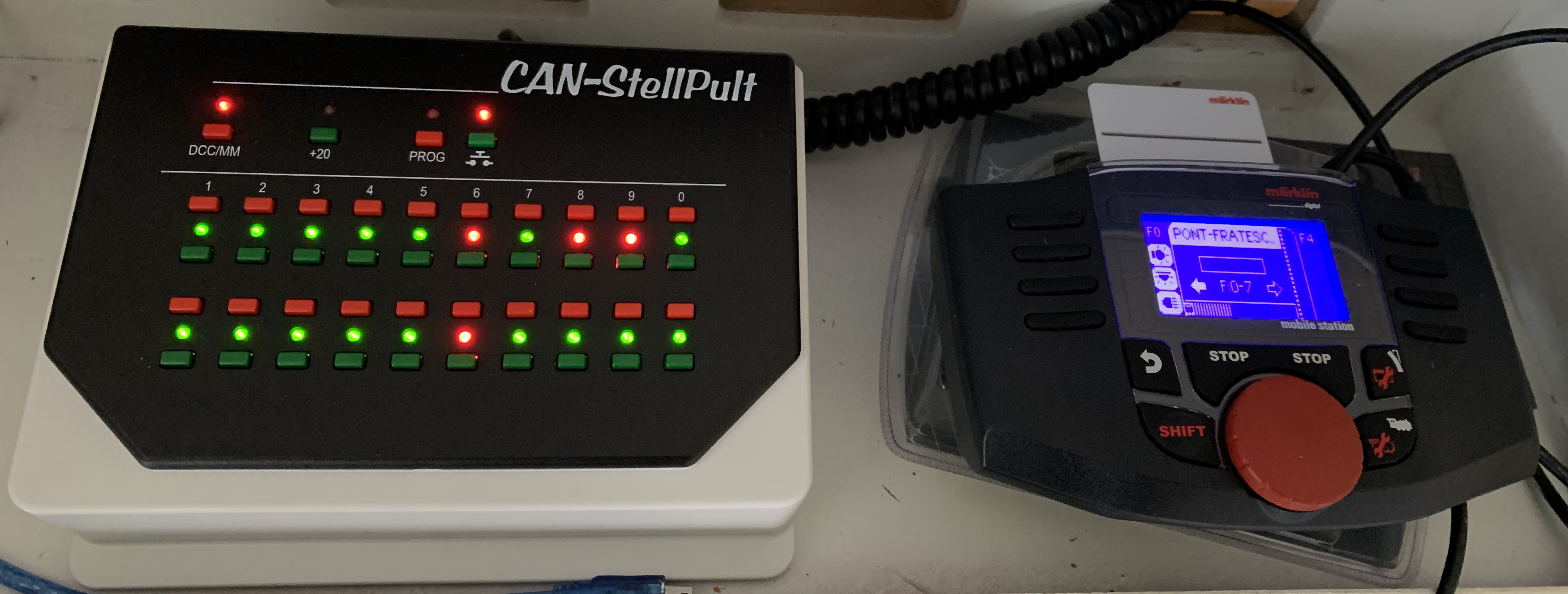
Je dois préciser que si j’avais appuyé le bon bouton à la mise en route (oui il faut lire la documentation AVANT), j’aurais évité une manipulation supplémentaire  . En gros tu branches la boite à la Digibox avec le cable fournis, tu appuies sur le bouton “Prog” pour sélectionner le format de communication Marklin et … tu peux commander tous tes solénoïdes
. En gros tu branches la boite à la Digibox avec le cable fournis, tu appuies sur le bouton “Prog” pour sélectionner le format de communication Marklin et … tu peux commander tous tes solénoïdes 
La documentation : Das CAN digital Bahn Projekt
Documentation en anglais : Canbeipackzettel_stellpult_002_en.pdf (126,6 Ko) et
Das CAN digital Bahn Projekt - EN.pdf (1,2 Mo)
Dans la version que j’ai installé, le boitier détecte même le mode STOP de la MS2 et se met en attente.
Voilà !
Prochaine étape concernant le bus CAN, tester la solution de rétro-signalisation …