Bonjour à tous,
J’ai lu ce post avec grand intérêt. Pour son titre séduisant « création d’un circuit intelligent » et aussi par son contenu qui aborde la possibilité de piloter des trains avec des solution totalement ou partiellement à base de DIY.
On parle dans ce fil de deux choses qui sont un peu mélangées mais qui sont très différentes l’une de l’autre :
- CC-Schnitte, qui est un boitier éléctronique, une passerelle, entre un ordinateur et un logiciel de gestion de réseau (RocRail, Train Controller etc) et une Geiltsbox par exemple.
- Railuino, qui est une bibliothèque écrite en C++ qui doit être chargée sur une carte équipée d’un microcontrôleur comme un Arduino et disposer d’un contrôleur CAN.
Railuino offre des possibilités très importantes mais nécessite de développer des environnement hard et soft assez complexes. De plus, cette bibliothèque est très bien écrite mais elle est ancienne (2013, c’est beaucoup en programmation), elle n’est pas adaptée aux nouveaux équipements, comporte quelques manques (comme la reconnaissance automatique en MFX) et doit être optimisée par rapport aux normes C++ 11 et suivantes. Je suis actuellement en train de réécrire certaines parties de cette bibliothèque que je teste au fur et à mesure. Un travail assez long mais bien avancé. J’en reparlerai bientôt j’espère.
CC-Schnitte par contre est une solution très simple, facile et rapide à mettre en œuvre si vous souhaitez piloter vos locomotives et votre réseau avec un logiciel tel que Rocrail. J’ai utilisé Rocrail car il m’a semblé qu’il emportait un peu les suffrages sur le forum mais cela fonctionne avec d’autres.
Page de présentation de CC-Schnitte :
https://www.can-digital-bahn.com/modul.php?system=sys5&modul=54#Mod_Top
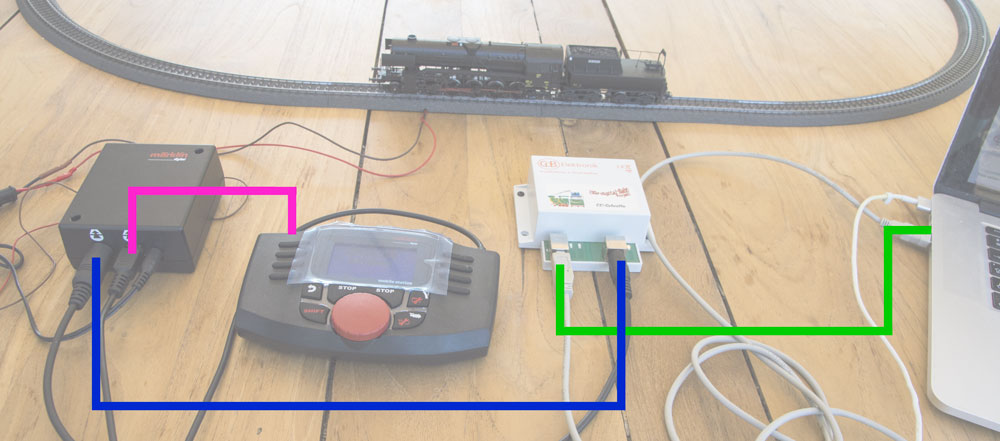
Il vous faudra un ordinateur + Rocrail + un boitier CC-Schnitte relié à l’un des ports USB d’un bord et à l’une des deux entrées CAN de la Geiltsbox. A l’autre entrée CAN de la Geiltsbox, vous reliez une MS2 mais je vous donnerai une solution plus tard pour vous dispenser de cette dernière si vous le souhaitez.
Vous devez relier l’ensemble comme présenté ici :
Ouvrir Rocrail, ouvrir un projet existant (démo) ou en créer un nouveau.
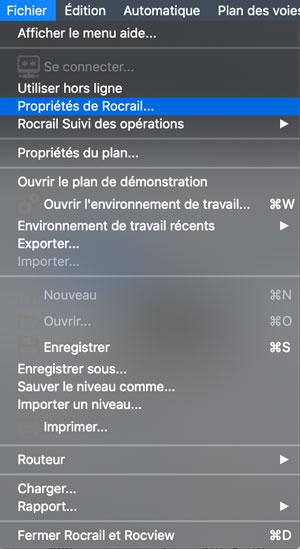
Dans le menu fichier, vous choisissez « Propriétés de Rocrail »
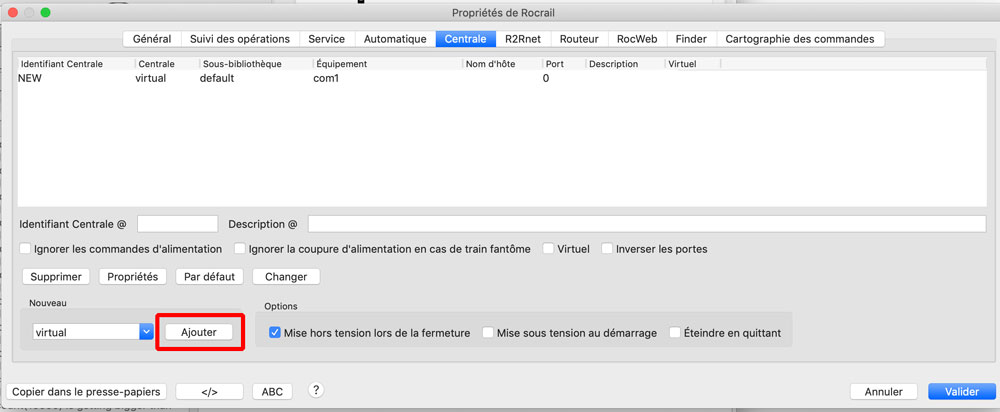
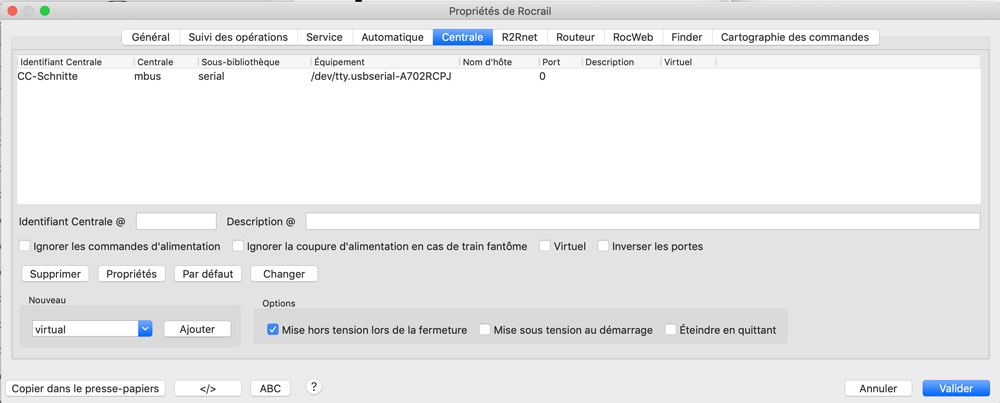
Cliquez sur le bouton « Centrale » au milieu en haut de la fenêtre, appuyez sur le bouton « Ajouter » et une ligne NEW s’ajoute dans la fenêtre.
Selectionnez le bouton radio « CC-Schnitte » et le port usb de votre ordinateur auquel est reliée CC-Schnitte. Comme nom identifiant de centrale, vous pouvez saisir par exemple CC-Schnitte ou tout autre nom.
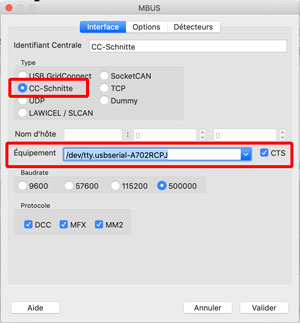
Vous validez et obtenez maintenant ceci :
Validez à nouveau.
Quittez Rocrail, la MS2 non brancée sur la Gleisbox, relancez Rocrail, choisissez dans => Fichier => Environnement de travail celui que vous venez de créer.
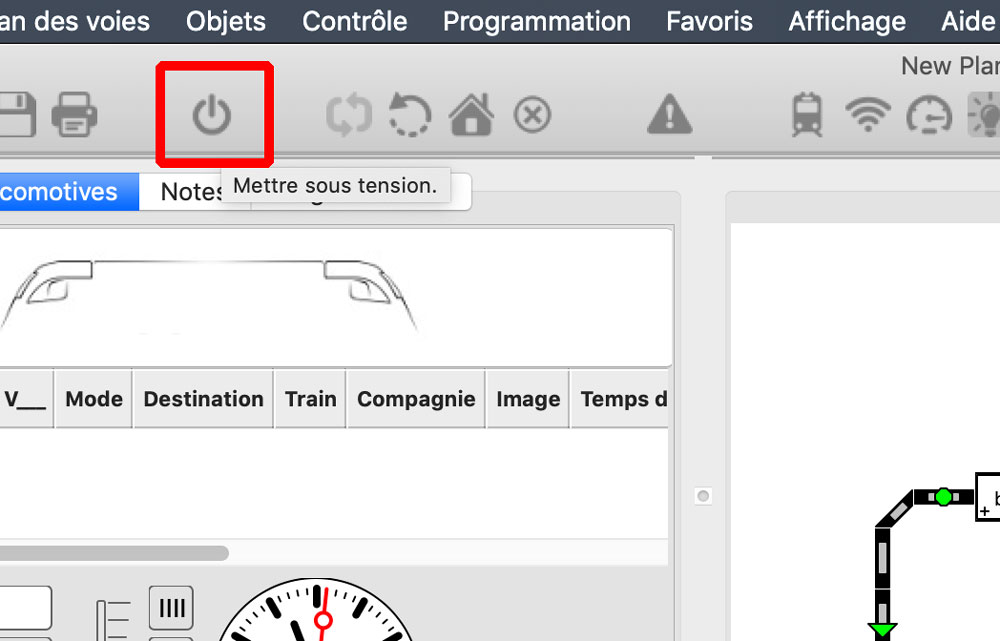
Mettez sous tension.
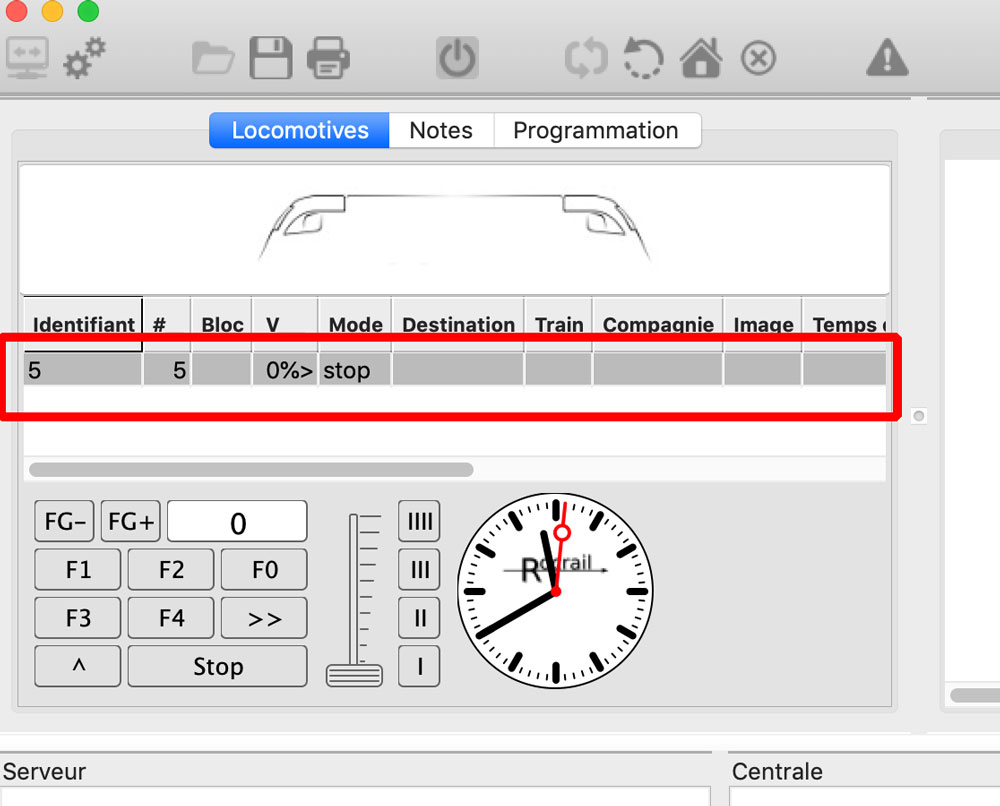
Branchez la MS2 sur la Gleisbox. Avec la MS2, faite rouler la locomotive pour activer le processus de reconnaissance par Rocrail. Cela peut prendre 10 à 20 secondes.
Une fois la reconnaissance opérée, vous voyez une ligne apparaître avec l’adresse Loc-ID (qui signifie local ID et non locomotive ID). Vous allez ainsi voir apparaître les locomotives, au fur et à mesure que vous allez les poser sur les rails avec Loc-ID qui s’affiche dans Rocrail.
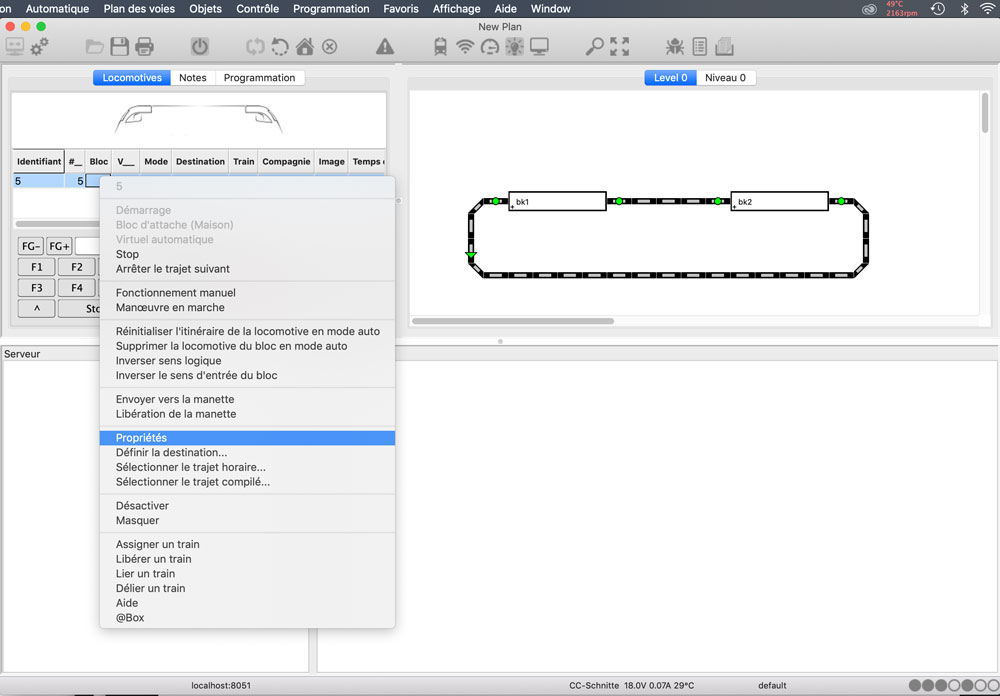
Sélectionnez la ligne puis click droit pour modifier les propriétés.
Et voilà, vous pouvez maintenant piloter vos locomotives.
Voilà pour ceux qui recherche une solution simple et facile à mettre en œuvre mais qui nécessitera tout de même de débourser les quelques 150€ de CC-Schnitte.
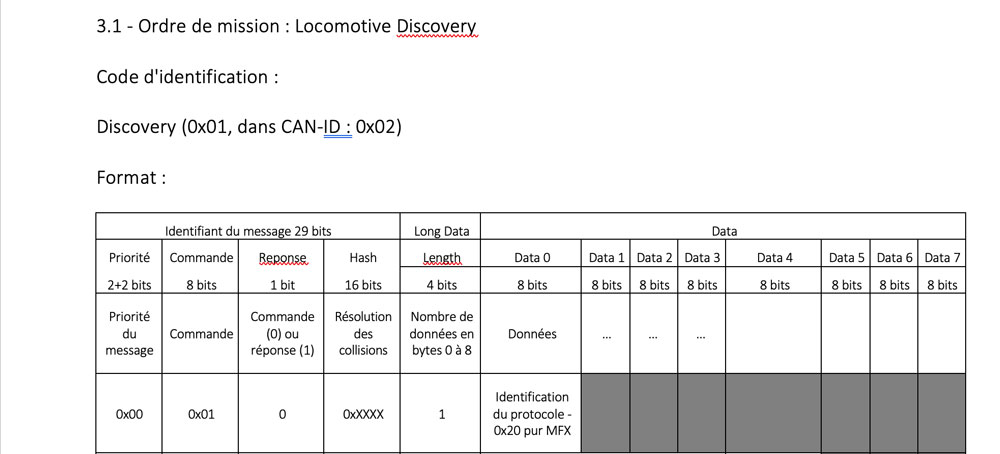
Notez qu’il est possible d’activer le processus d’identification automatique MFX sans MS2 ou autres stations. N’importe quel appareil relié au bus CAN et capable d’envoyer un message CAN peut faire l’affaire. Cette commande est documentée dans le protocole Marklin à la rubrique 3.1 Locomotive Discovery.
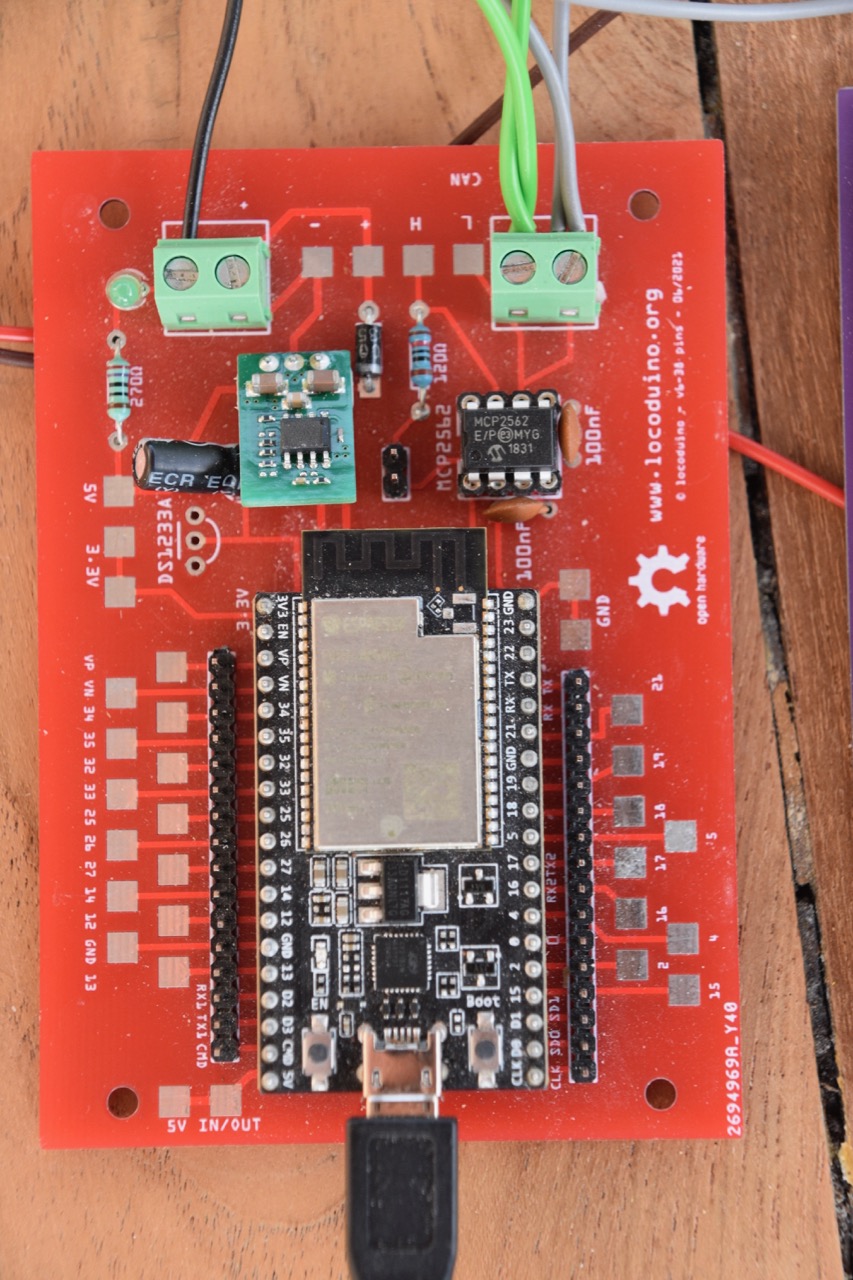
Je vais maintenant m’attaque à la boite CC-Schnitte et j’ai bon espoir de vous présenter rapidement une solution qui pourrait alors fonctionner sur la même carte CAN que pour le discovery.


")