Bonjour à tous,
Comme je l’ai dit dans ma présentation, je suis de retour sur ce Forum pour du technico-technique. En effet, j’aimerai réussir à développer un système de contrôle Marklin plus avancé que ce que la marque fournit (et bien moins cher).
Je lance donc ce post pour permettre à ceux qui le souhaitent de pouvoir suivre mon avancement dans ce projet.
Commençons par préciser le but de ma démarche: à terme, je souhaite contrôler un circuit de trains complexe et complet à l’aide d’un Arduino (et de la librairie Railuino) de manière intelligente en connaissant la position de chaque locomotive sur le réseau à tout instant. Cela me permettrait de développer un système de détection de collision, de gérer des horaires précis et probablement un tas d’autres choses. Le but est que le tout fonctionne en harmonie avec le système Marklin Digital.
Dans un premier temps bien-sûr, je me limiterai à la gestion d’une seule locomotive sur un circuit simple. La faire avancer sera déjà une belle réussite. 
Après, je pourrai tenter un début d’automatisme avec, par exemple, une gare à deux voie et deux trains qui pourront faire le tour du circuit (à voie unique) chacun à leur tour.
Ces deux premiers points seront déjà un belle avancée personnelle bien que cela n’apportera rien de nouveau à ce qui existe. Autant se contenter de peu et se réjouir des avancées supplémentaires 
Avec cela en tête, j’ai pu commencer mes premières recherches. La première chose importante est que Marklin utilise un bus de communication CAN. On va passer les détails, mais en gros c’est un protocole de communication entre machines habituellement utilisé dans l’industriel.
Les données circulant sur ce bus sont ensuite traduites en l’un des protocoles de Marklin, ceux-ci lui sont propres (mfx, MM2). Quoi qu’il en soit, pas besoin de s’attarder à les comprendre, on va se contenter de causer au bus CAN et tout sera traduit par le système existant.
A titre d’exemple, voici les pinouts de la MS1 et de la MS2:
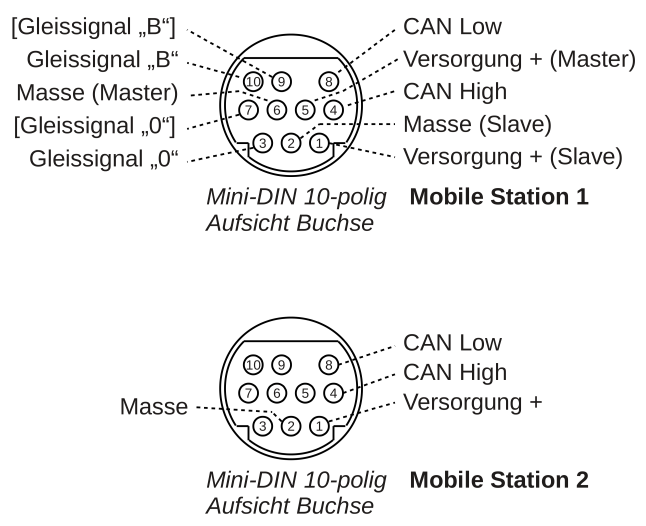
La majeure différence entre les deux est que la MS1 s’occupe de créer le signal envoyé aux locos (c’est le “Gleissignal” - signal de voie) mais pas la MS2. Dans le cas de la MS2, le CAN est traduit par le boitier 60113. D’ailleurs, si on prend la peine de regarder ce que ce boitier et l’équivalent de la MS1 ont dans le ventre, on voit que le 60113 a plus d’électronique dans le ventre, justement pour traduire les signaux.
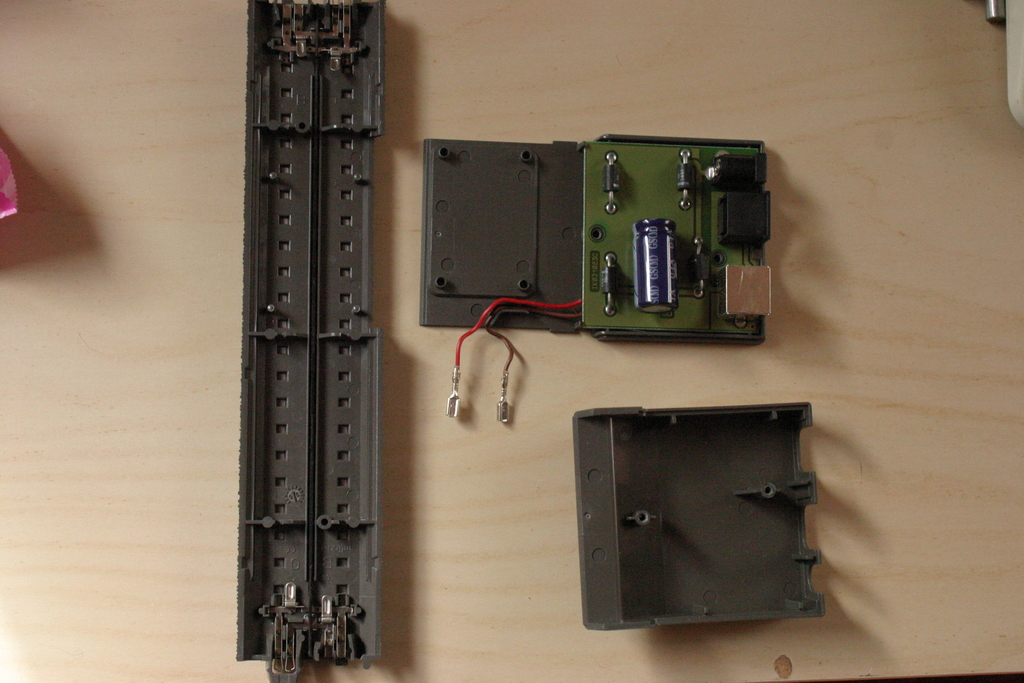

En fait, le 24088 se contente de redresser la tension du transfo et de faire passer le signal de rail depuis la ms1 jusqu’au rail. Il fait aussi la jonction entre les deux MS1 si besoin et surprise, ça se fait via le bus CAN
Pour ceux qui n’y connaîtraient absolument rien en électricité, redresser un courant veut dire transformer un courant alternatif en un courant continu. Cela m’amène à une petite info bonus: en réalité, Marklin travaille en 12v continu. En effet, si on prend le 18v alternatif des transfos et qu’on le divise par la racine carrée de 2 pour avoir la valeur en courant continu, on tombe bien sur du 12v, ce qui est très commun! (je vous passe la démo pour trouver racine de 2, soiyez rassurés  ) [Edit: cette information est une connerie, je vous invite à lire les réponses ci-dessous ]
) [Edit: cette information est une connerie, je vous invite à lire les réponses ci-dessous ]
Pour revenir au choix du bus CAN, c’est là un choix très judicieux de la part de Marklin. En effet, comme son nom l’indique, nous avons affaire à un bus. Cela veut dire qu’il est très simple de connecter plusieurs appareils appareils ensembles avec un minimum de fils (dans ce cas-ci, il y a le CAN High, CAN Low et la masse, le gnd).
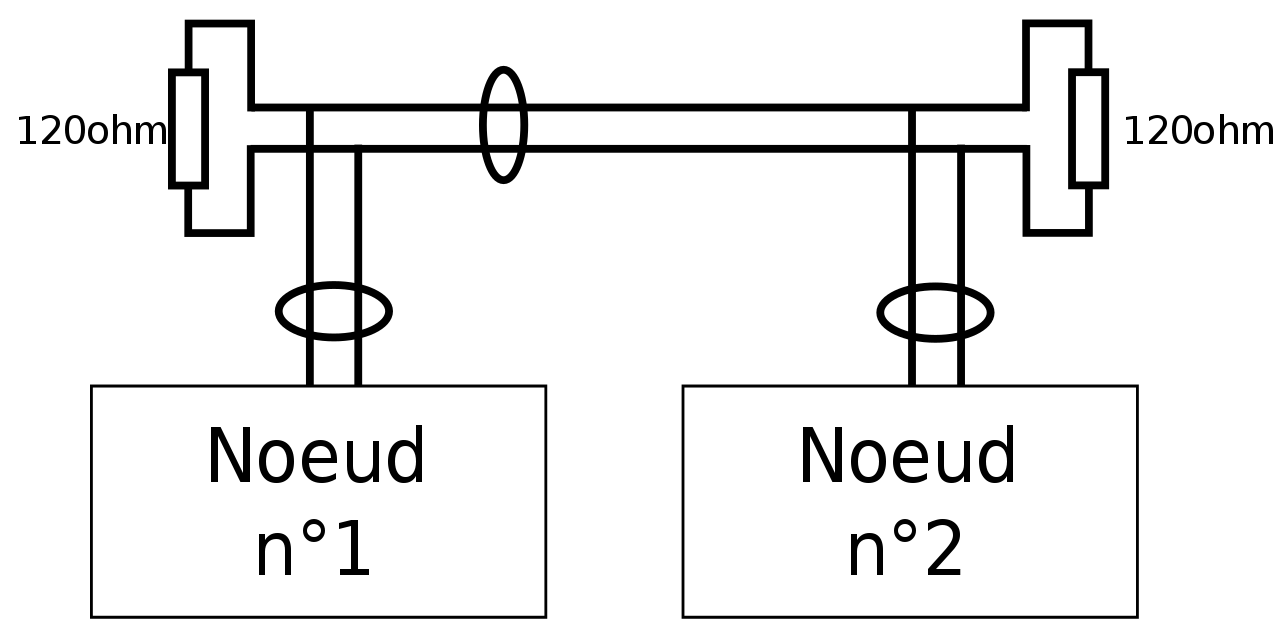
Et en plus, on peut mettre autant d’appareils qu’on veut sans souci, le CAN est prévu pour ça.
https://upload.wikimedia.org/wikipedia/commons/3/30/CAN_Architecture.svg
Eh bien, en gros voilà où j’en suis. J’ai commandé cet après-midi même un module Arduino permettant de gérer avec ce-dernier la communication CAN. Les premiers tests sont donc à venir, je vous tiendrai bien entendu au courant ici
Si vous avez des suggestion, des propositions ou quoi que ce soit, je suis totalement ouvert! Le but de ma démarche est avant tout de partager, autant que ça aille dans les deux sens
A très bientôt,
Yann
PS: voici quelques liens en vrac qui m’ont permis de vous raconter tout ce que j’ai écrit ci-dessus 
skrauss.de/modellbahn/canbus_stecker.html
fr.wikipedia.org/wiki/Bus_de_données_CAN
photos.jtl3.com/Science/Electro … Station-1/
html.alldatasheet.com/html-pdf/1 … 2C250.html
marklin-users.net/forum/pos … rogramming

 je n’ai pas vraiment poursuivit. Sinon j’utilisais les MCP2515 + MCP2551 pour l’interface et je vais probablement remplacer le MCP2551 par l’ISO1050 pour avoir une séparation galvanique.
je n’ai pas vraiment poursuivit. Sinon j’utilisais les MCP2515 + MCP2551 pour l’interface et je vais probablement remplacer le MCP2551 par l’ISO1050 pour avoir une séparation galvanique.


 A vérifier aussi, donc.
A vérifier aussi, donc.
 ) je m’y suis remis. Comme dit dans le précédent post, j’ai tenté de modifier la librairie Railuino afin de la rendre compatible avec mon module MCP2515 possédant un quartz à 8MHz et non 16MHz. Spoiler alert, ça marche toujours pas
) je m’y suis remis. Comme dit dans le précédent post, j’ai tenté de modifier la librairie Railuino afin de la rendre compatible avec mon module MCP2515 possédant un quartz à 8MHz et non 16MHz. Spoiler alert, ça marche toujours pas 
