C’est parce que vous n’avez pas cherché à l’exploiter plus à fond. Jean (johnjeanb) qui est un inconditionnel de Rocrail et qui le connais bien te dira sans doute que l’on n’en verra sans doute jamais les limites.
Oui, il faut dezipper et placer le dossier complet dans les documents Arduino. En ouvrant le fichier “CAN_USB_gwV26Q_GFP_CSP10.ino”, vous allez automatiquement charger les fichiers liés, dont la bibliothèque Railuino qui a été ici renommée.
Le shield de Seeed Studio est vraiment bien mais les originaux sont à 20€ environ. Moi j’utilise des clones comme celui-ci qui reviennent à 10€ environ. (en cherchant on trouve à 7-8€)
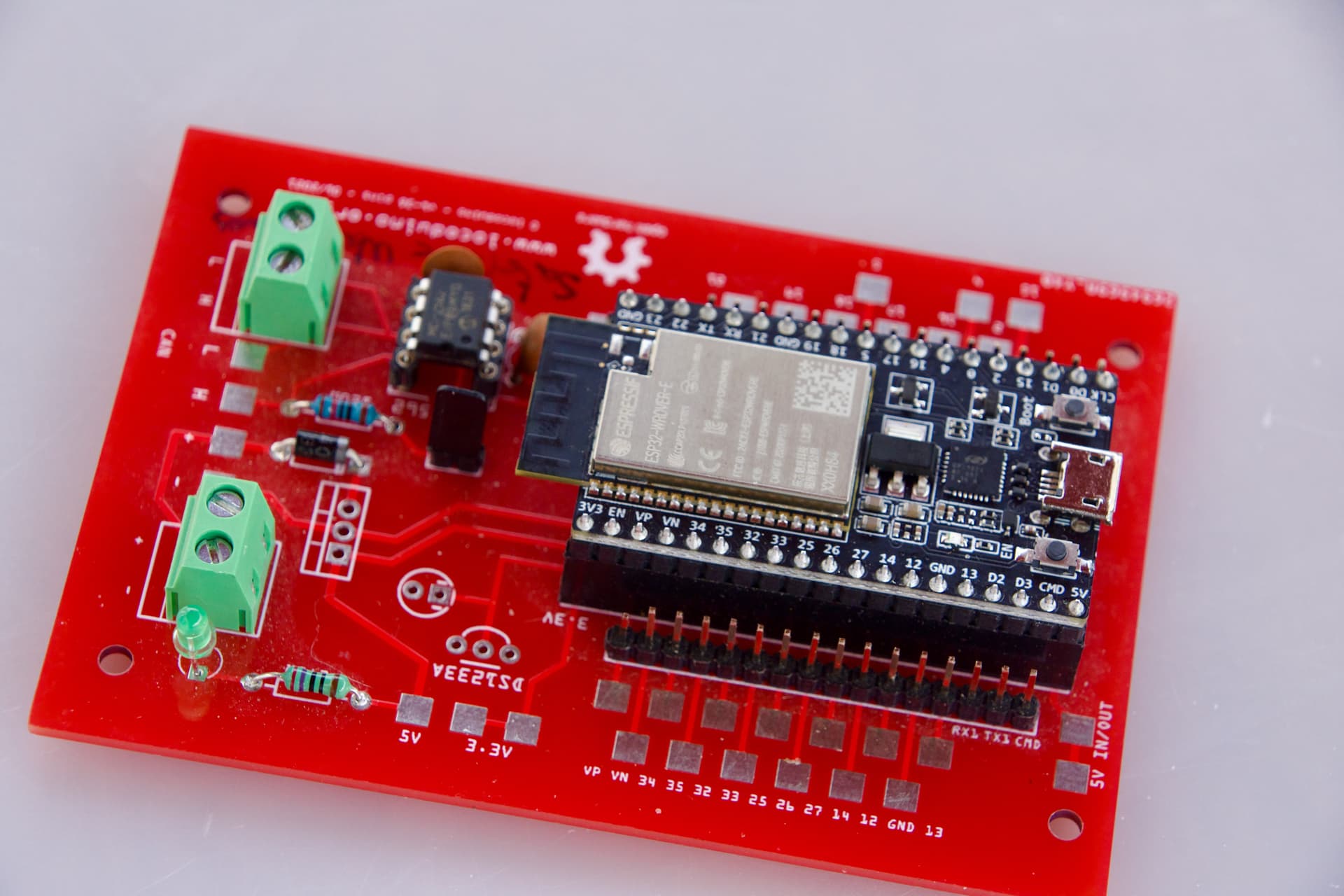
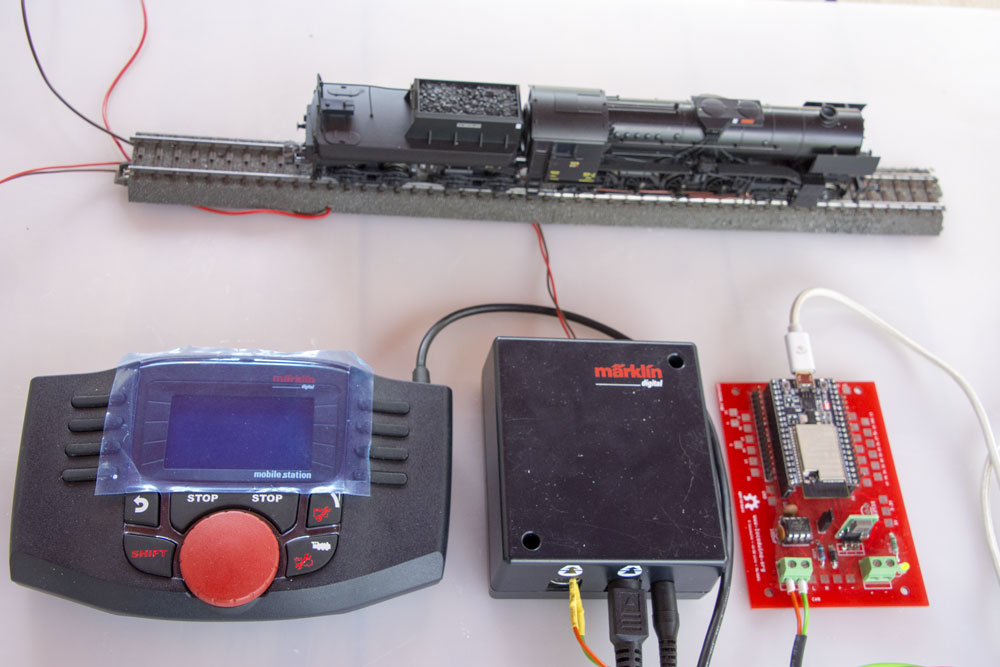
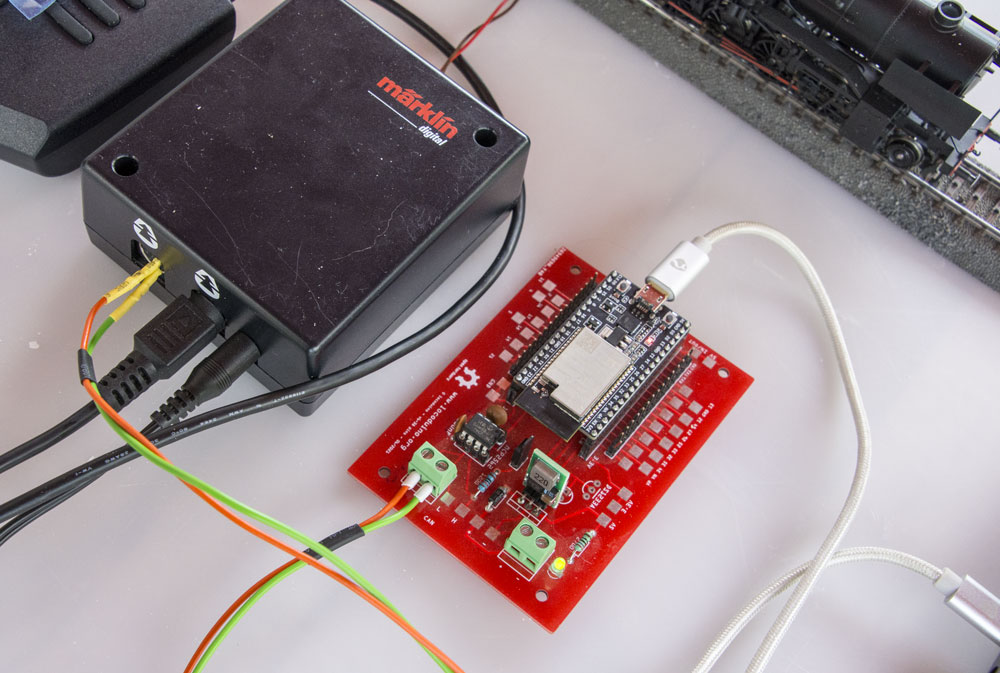
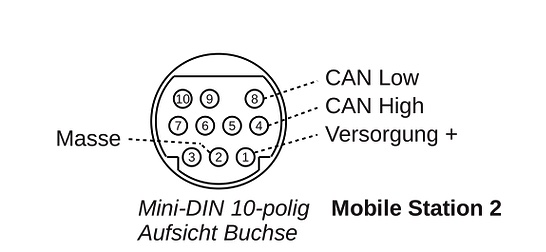
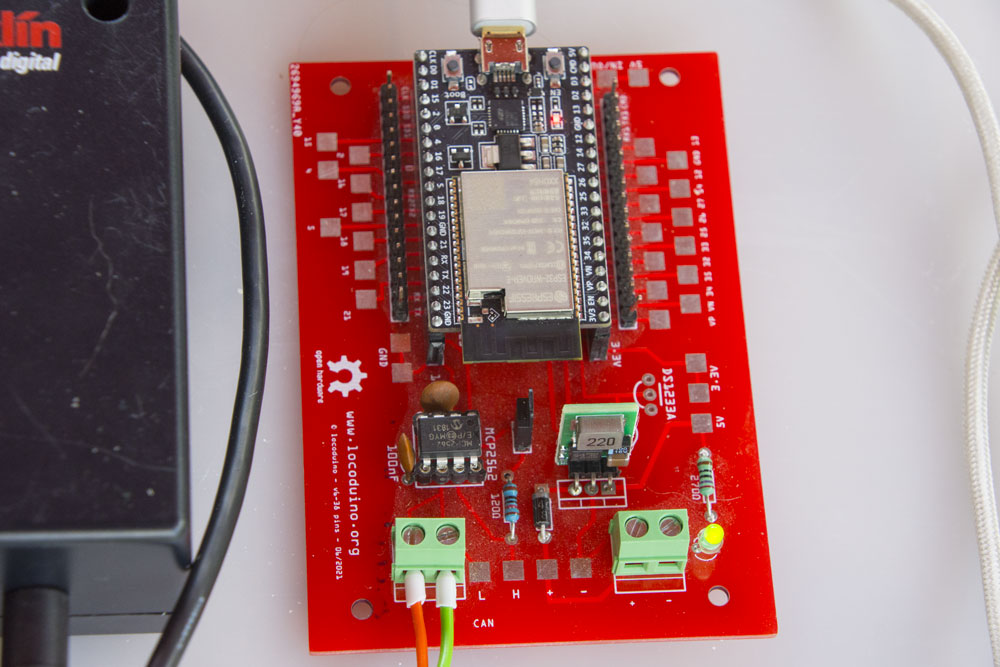
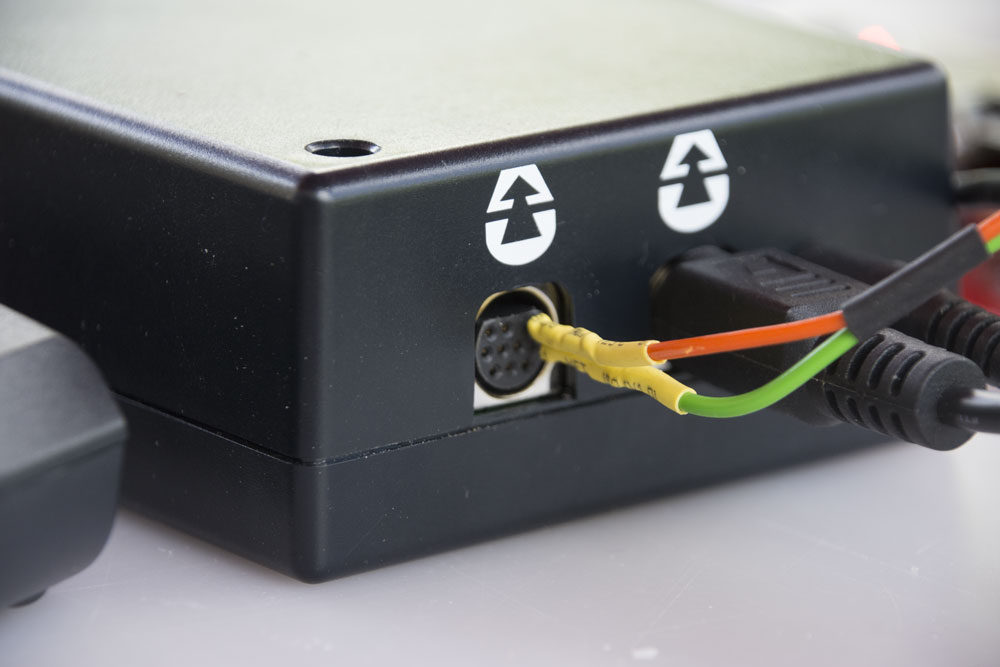
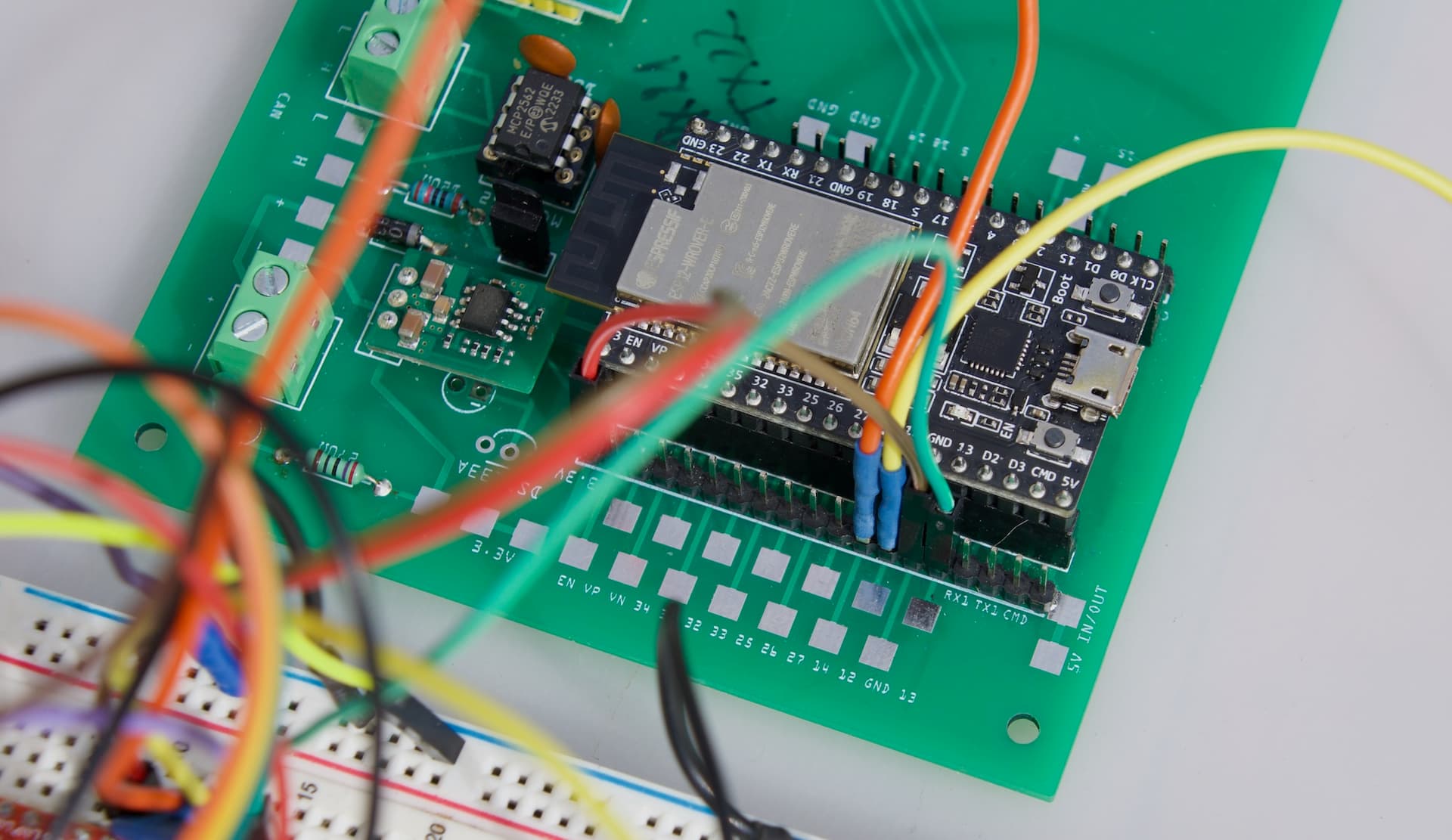
Pour les entrées du CAN H et CAN L sur la Gleisbox, tu as sans doute vu que je ne me suis pas emm**dé, c’est des pins Dupont directement enfichées dans les bonnes broches.
N’hésite surtout pas à revenir vers moi au besoin.
Christophe