Bonsoir à tous,
Le titre est alléchant 
La suite un peu moins, puisque je viens vous parler de mes élucubrations ![]()
J’ai un peu parlé d’un système digital que je développe moi-même. J’ai promis sur un autre fil que j’informerai ceux que cela intéresse, donc je le fais.
D’abord pourquoi ai-je pris la décision de faire mon système moi-même ?
C’est surtout parce que je veux piloter mon réseau par PC et que je trouve tous les systèmes du commerce trop complexes et trop encombrants, j’avoue aussi ne pas y comprendre grand’chose dans le dédale du matériel existant. ![]()
![]()
![]()
Je dois quand même rajouter que c’est aussi mon plaisir !! ![]()
Le cahier des charges était donc la conception la plus simple possible d’un système digital utilisant un PC ; simplicité et fiabilité avant tout, pas de gadget, pas de trucs compliqués ….
Le branchement se fait en connectant une « boite noire » au port USB du PC, en sortie on a directement le signal à envoyer aux rails.
Le branchement est le suivant :
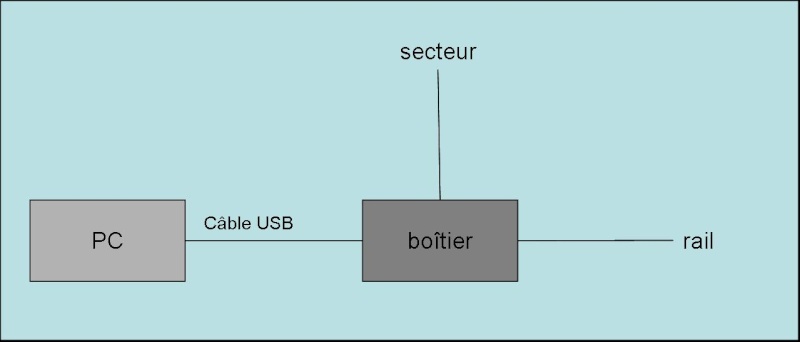
Difficile de faire plus simple, n’est ce pas 
Que contient le boîtier :
- un transformateur de 60 VA avec protection thermique
- un booster de 3A avec limiteur d’intensité
- une interface USB/Motorola
- un « chien de garde »

Le limiteur d’intensité assure la protection en cas de court circuit.
L’interface USB/Motorola permet la commande de 80 locomotives et 320 appareils de voie, elle convertit les commandes du PC en signal Motorola 1 ou Motorola 2 ; pas de mfx pour l’instant, mais c’est prévu.
Pour augmenter la fiabilité, l’interface renvoie de façon périodique les commandes de vitesse aux locomotives roulantes, avec 50 locomotives roulant en même temps (cas peu probable chez moi !!) chaque loco reçoit son signal une fois par seconde.
Encore pour augmenter la fiabilité, il y a un « chien de garde » , c’est le nom qu’on donne dans l’industrie aux dispositifs destinés à surveiller le bon fonctionnement d’un système. Dans notre cas, le chien de garde coupe automatiquement le courant de sortie vers les rails en cas d’anomalie telle que plantage de l’application du PC, plantage du logiciel embarqué dans l’interface ou câble USB débranché. Le chien de garde lui-même est un système ultra simple mais actif, ce qui signifie que s’il arrivait qu’il fonctionne mal, tout s’arrête. Je pense que pour des petits trains c’est bien suffisant !!
Le logiciel PC :
Pour l’instant, je n’ai développé que la partie destinée à faire les essais de la boite noire.
Disons qu’on a à peu près les fonctionnalités d’une 6021.
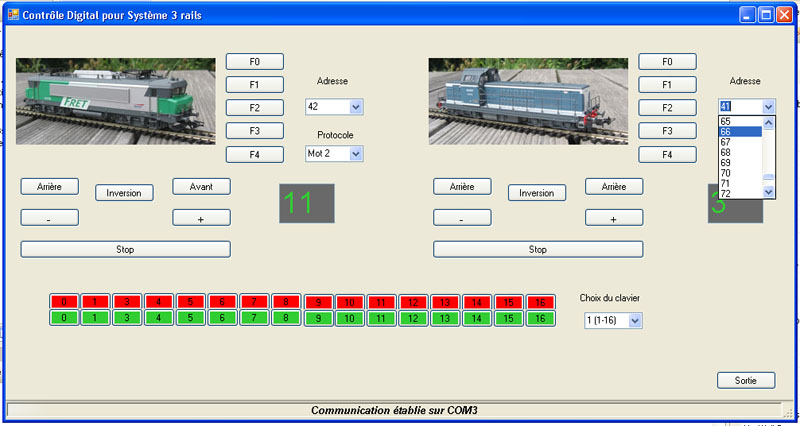
Le logiciel propose 2 tableaux de bord simplistes pour les locomotives, mais chaque tableau de bord permet l’essentiel, à savoir sélectionner l’adresse et le protocole de la locomotive à laquelle il est attaché (on peut choisir parmi 80 adresses) et évidemment piloter la locomotive.
En partie basse un clavier permet la commande des appareils de voie (jusqu’à 320).
Un petit gadget : le logiciel peut rechercher automatiquement l’adresse d’une locomotive; j’ai quand même succombé à la tentation du gadget
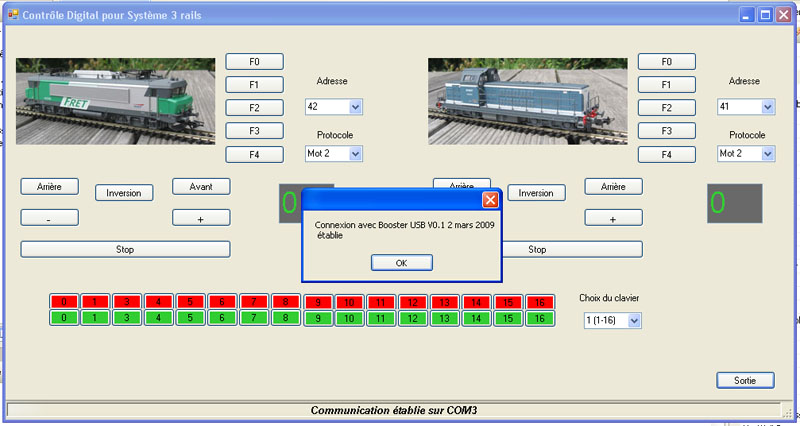
Pour rendre les choses les plus simples possible, le programme démarre en recherchant automatiquement le port sur lequel l’interface est connectée, il n’y a rien à paramétrer !! Dès qu’il a trouvé la connexion (4 secondes d’attente maximum), il informe l’utilisateur et le système peut être utilisé.
On se retrouve alors devant l’équivalent d’une station de contrôle assez simple :
Pendant les 15 derniers jours, j’ai procédé à des essais dans tous les sens soit en réel, soit en simulation et même avec 78 locos simulées, je pilote parfaitement les deux dernières sans retard visible!
Bon voila où j’en suis pour l’instant !!
Je serai pris par d’autres occupations dans les mois qui viennent, donc j’arrête tout développement ultérieur pour l’instant, mais j’y reviendrai plus tard.
En attentant j’aimerais avoir votre opinion sur les inconvénients que vous voyez à un tel système, sur les améliorations que vous y apporteriez, … enfin toute suggestion constructive est la bienvenue.
Ce que j’envisage dès que j’aurai le temps, c’est :
- rajouter le protocole mfx, (peut-être pas en première priorité)
- rajouter une entrée de rétrosignalisation (S88 ou similaire)
- développer plus loin le logiciel PC pour lui donner des possibilités telles que TCO, rétrosignalisation, commandes à joysticks, contrôle automatique de trains, ….
J’ai envisagé par un moment l’utilisation de RRTC ou WDGP avec ma boiboite, ce serait tout à fait faisable ; mais ce serait au détriment de la sécurité. En effet dans mon système, le PC doit périodiquement envoyer une commande spécifique pour activer le chien de garde, si cette commande est absente pour plus de 2 secondes, le chien de garde bloque automatiquement la sortie du booster. Or ni RRTC, ni WDGP ne sont prévus pour envoyer cette commande. Enfin on pourrait toujours imaginer de supprimer le chien de garde et rajouter un bouton d’arrêt d’urgence.
Bonne soirée à tous ![]()
 C’est sympa…
C’est sympa… )
)