Bonjour,
J’ai rajouté un transfo Märklin pour l’alimentation de tout ce qui est éclairages sur le réseau et aussi l’alimentation du pont tournant .
Devrais je relier la masse (o ou câble brun) avec celui de la CS2, donc tout ce qui est courant traction digital ?
Les éclairages sont commandés par des M84 .
Merci et @+
Bonsoir
La masse commune n’est nécessaire que si l’on a un passage à niveau ou un vieux pont tournant 7186.
. Sinon elle peut rester “flottante”.
La masse commune n’est possible que si la tension alternative est fournie par un transformateur isolé (cas de la plupart des transfo de trains).
Jean
Bonjour Jean,
Merci pour ta réponse, c’est un transformateur Märklin 52Va référence 6002 que j’ai dédié à l’alimentation de mes éclairages (et de mon pont tournant 7286 piloté par un décodeur LDT et RRTC, qui demandait une alimentation externe d’après la notice) .
Donc relier la masse, cela a t il un avantage ? Ou alors un inconvénient ?
@+
Bonjour,
Je pense que l’on a tout intérêt à disposer d’une masse commune, c’est-à-dire plot 0 ou câble brun du transfo au même potentiel (de référence) que le raccord aux rails de roulement de la centrale. Cela permet d’éviter certaines anomalies de détection par contact sur le bus n88.
Mais bon, chaque réseau a ses particularités.
Bonjour à tous
@3rails, comme @philou75 je pense qu’une masse commune est préférable. Ceci permet de faire plein de branchements d’automatismes déclenchés par le train.
Amicalement
Jean
Ne pas oublier d accorder les transformateurs ensemble, s il y en a plusieurs
Hello,
En fait, c’était ça ma question, relier la masse de mon transfo éclairage avec la masse de ma CS2 ?
Ben voila, je suis fixé .
@+
Attention, il y a une étape de vérification des phases :
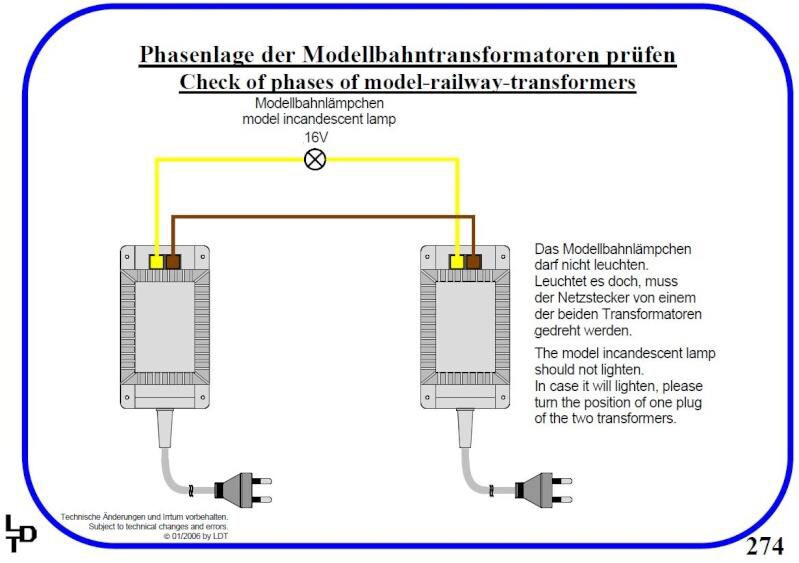
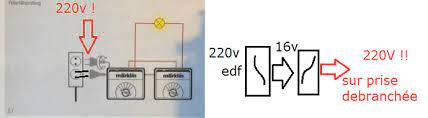
Si la lumière s’allume, il faut “retourner” une des deux prises d’un transformateur, et faire un repère sur les 2 prises pour les brancher toujours de façon à ce que la lumière ne s’allume pas (si on fait le branchement de test, bien sur).
Bonjour Vincent.
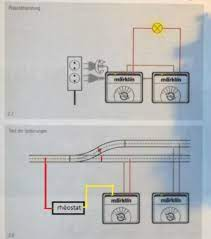
Ce n’est pas nécessaire de faire cette manip… c’est seulement quand on branche deux alimentations en parallèle… la masse ET le fil rouge !
Ici, c’est seulement la masse (fil brun) qui est commune !
Thierry.
1 « J'aime »
Tout à fait Thierry ![]()
![]()
![]()
Je prends le sujet en marche.
Comment réaliser une masse commune entre une CS2 60215 et une alimentation en courant continue 12V (alimentation type imprimante 3D par exemple).
- Soit pour utiliser un freinage type Märklin (-12V CC) avec détection de consommation
ou - Soit pour pouvoir commander directement un relais par détection d’un court-circuit entre les 2rails (essieux non isolés)
Bonjour Benoit
Une masse commune entre une sortie digital et une autre tension (alternative ou continue) ne pose pas de problèmes à condition:
- que l’autre alimentation (alternative ou continue) soit flottante.
- que bien sût JAMAIS, l’autre polarité de cette alimentation n’entre en contact avec la sortie digitale. Destruction quasi assurée de la CS3, CS3, MS2, MS1, etc.
Associer une tension continue pour recréer le module de freinage Märklin est parfaitement possible mais attention aux erreurs de mise en contact accidentel (par frotteur) du B et de la tension continue.
Dans mon réseau de plancher, j’avais essayé d’éliminer les modules de freinages Märklin (chers et plein de cablage) par une commutation par relais, de toute la section en CC pour un freinage doux
Voici le résultat (réseau digital, commutation tension continue devant certain signaux avec temporisation pour limiter les risques.

Le cablage est plus simple mais j’ai fini par basculer sur Rocrail ce qui m’a permis (entre autres)
- d’alléger sérieusement le cablage (plus de sections d’arrêt, plus de sections de ralentissement)
- d’obrenir un ralentissement et un controle de vitesse sans aucun cablage sur le “rail” central.
- de laisser toutes les fonctions actives et télécommandables en zone d’arrêt
- de transformer n’importe quel train en train navette sans les attelages conducteurs et la commutation de frotteurs
- plein d’autres avantages qu’il serait trop long de décrire ici.
Amicalement
Jean
1 « J'aime »
Que faut-il comme équipement pour installer Rocrail ?
Il faut disposer:
- d’un ordinateur (un portable non dédié, windows dans mon cas) = gratuit
- d’une centrale digital CS3, CS2, ECOS et une bonne vingtaine d’autre); Une CS3 dans mon cas mais il existe des solutions moins onéreuses.
- d’un cable approprié à la centrale (Ethernet-CAT5 dans mon cas) mais pourrait être USB, RS232, etc (5€)
- d’un téléchargement de Rocrail à faire à tout moment, sans engagement financier. On ne donne que quand on veut et combien on veut. Aucune limite d’accès aux mises à jour (presque quotidiennes.
Je n’ai jamais regretté de m’y être mis.
Amicalement
Jean
Je pense qu’il faut:
- récupérer des informations de capteurs de position (connectés à la CS2 ?)
- envoyer des ordres (aiguillages, …) (connectés à la CS2 ?)
- piloter les locomotives (mfx + DCC) (connectés à la CS2 ?)
Est il possible de commander les locomotives à partir de la CS2
et les capteurs / effecteurs à partir du PC (voir par l’intermédiaire d’un arduino → Locoduino) ?
Oui une solution consiste à avoir une CS2 (ou CS3) piloter des capteurs (système S88) mais il existe également des solutions directes (connexion d’un système d’acquisition depuis un PC.
Oui, bien sur un transit de ces commandes par une cS2 est une solution privilégiée
Oui la encore la CS2 peut soit controller directement soit, recevoir les ordre de Rocrail.
A noter que des commandes d’aiguillages ou de signaux depuis la CS2 peuvent être en conflit avec Rocrail avec des commisions possibles.
Pour faire court:
- tous les articles (loco, aiguillages, signaux, etc) peuvent être cammandés indifféremment depuis la CS2 ou le TCO de Rocrail et les informations sont mises à jour sur l’autre machine (CS2 ou PC)
- la CS2 joue un role important pour les programmations des locos et autres décodeurs, ainsi que le diagnostic, les mesures de courant, etc.
- concernant les solution Arduino, je ne peux rien en dire mais je sais que de multiples utilisateurs de Rocrail utilisent des solutions Arduino.
Jean
Merci.
Pour relier la CS2 au PC, c’est par la liaison RJ45 (croisé ?) en direct ou par l’intermédiaire d’un routeur ethernet ?
En fait, ce que j’aimerai, c’est freiner ou accélérer progressivement en envoyant des ordres en mfx et en DCC aux locomotives.
Cela permettrait d’éviter les courts-circuits avec le courant continu (freinage).
Sur Locoduino, il existe une architecture où on relie un Arduino à la CS2 avec un bus S88 (le plus court possible). Cet Arduino joue le rôle de passerelle vers un bus CAN (plus robuste).
Plusieurs Arduinos sont branchés sur le CAN et permettent d’interfacer des entrées / sorties.
En fait n’importe quel cable CAT5 (direct ou croisé = straight or crossover) convient.
Une liaison directe (sans routeur) convient très bien Mais il faudra programmer les adresses et les rendres manuel (fixe) au niveau de la CS2
Pour ma part avec ma CS2 (maintenant un CS3) et mon PC (Win 10) la configuration est la suivante:
CS2 IP Manuel
IP 192.168.000.23
IP Mask 255.255.255.000
IP-Gateway 192.168.000.001
DNS Server 192.168.000.001
CS2 CAN Broadcast
Ziel-Adresse 192.168.000.255
Rocrail /rocrail/eigenschaften/Zentrale Adresse 192.168.000.23
PC IPV4 Eigenschaften
Adresse
IP 192.168.000.23
IP Mask 255.255.255.000
Default Gateway 192.168.000.001
Jean