la CS3 représente un net progrès par rapport à la CS2 et permet de créer des automatismes. Son net inconvénient (comme les ECOS etc) est de ne pas savoir où chaque train est
elle permet de positionner tous les paramètres des locos ainsi que programmer les sons
les automatismes peuvent être sophistiqués (condition OU, ET, RANDOM, etc) mais ca ne remplace pas Rocrail.
Peut elle gérer les ralentissements ?
La CS3 pourrait gérer les ralentissement si elle savait quelle loco est ou (un capteur lui dit qu’il y a “quelque chose” à tel endrtoit mais rien d’autre. Donc dans la pratique: modules de ralentissement et sections isolées sont nécessaires si le réseau gère plusieurs locos (28 pour mon cas)
beaucoup d’excellents tutos existent sur Youtube en Allemand et en Anglais et quelque uns en Français.
Combien de cantons faut il (ralentissement + Stop)?
en utilisant la CS3 avec un très petit nombre de trains il est possible de faire des commandes de ralentissement pour une loco specifique.
dans ce cas et avec des locos digitales récentes (simulation d’inertie) il est possible de faire bien avec 2 cantons (1) ralentissement et (2) arrêt
D’un point de vue fonctionnel, quelles sont les différences entre une CS3 et Rocrail ?
La CS3 fournit plein d’outils pour gérer son réseau et diagnostiquer des problèmes, elle fournit la puissance digitale au réseau (5 ampères dans mon cas)
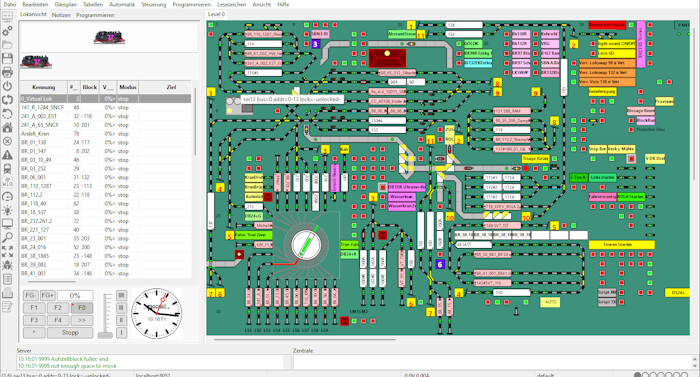
Rocrail seul ne peut pas piloter un réseau, il lui faut une interface (CS2, CS3, autre) mais il doit connaitre l’intégralité du réseau, le vérifier (pas d’erreurs), il faut lui communiquer la première fois où chaque loco se trouve (dans quel block). Ensuite ce n’est plus VOUS qui conduisez les trains mais Rocrail. Vous conduisez RR qui ainsi met à jour en permanence la position de chaque train.
Quelques avantages de RR
les sections isolées et modules de freinage sont inutiles car les trains sont arrétés par commande digitale. C’est aussi vrai pour les signaux / relais Les signaux n’ont plus qu’une fonction cosmétique donc pas de signaux aux endroits cachés ou - quand on débute - faute de moyens de tout acheter
les commandes de vitesse sont indépendantes de la loco et on commande soit un pourcentage de la vitesse maximum de chaque loco (exemple section à 40%) soit par les vitesses simplifiées de RR (Vmax, Vroute, Vmid, Vmin)
Chaque loco a sa propre vitesse et SUR LA LOCO on règle l’inertie au démarrage, au freinage
n’importe quel train peut devenir une navette (rouler en refoulement) et s’arréter au bon endroit SANS attelages conducteurs ni inversion de frotteur
le fonctionnement Aquarium est natif (par défaut) chaque train va là ou RR veut mais un fonctionnement manuel (drag & drop) ou par horaires sont possibles
Bonjour à tous,
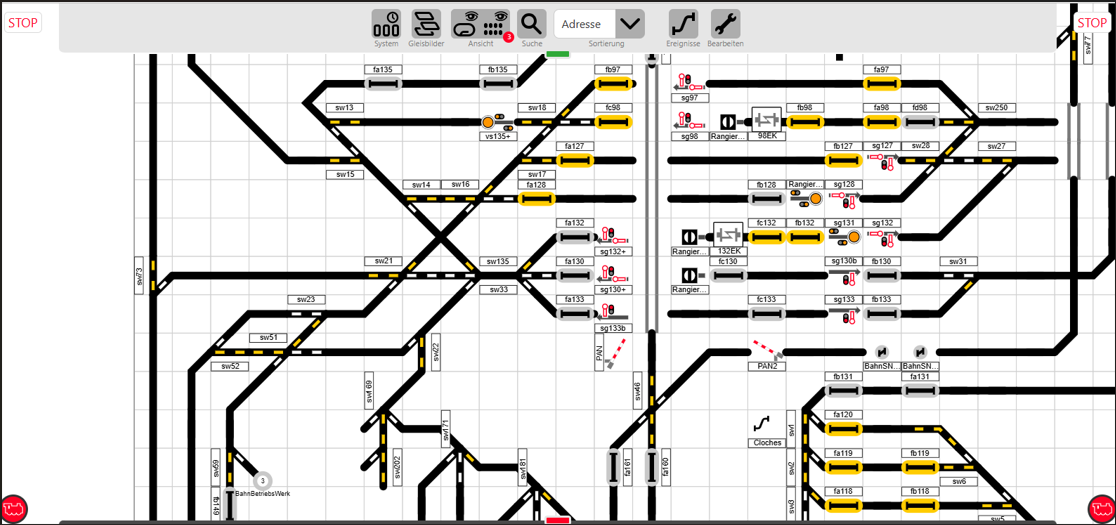
Je suis depuis assez longtemps en “phase d’hésitation” entre en rester à ma CS2 (avec le programme CS2.exe afin d’avoir le “layout” de la totalité du réseau sur un écran confortable) et passer à un logiciel PC (Rocrail,iTrain, etc.).
Mon hésitation persiste car j’aime bien “jouer au train”, c’est-à-dire faire des manœuvres, disloquer et recomposer des rames, y compris en stoppant la machine de manœuvre dans une zone de branchements. Les logiciels PC sont parfaits pour un réseau avec un nombre important de cantons où les trains roulent, mais où il y a peu de manœuvres.
Pour moi l’inconvénient principal de la CS2 (ou CS3), par rapport à un logiciel PC, c’est que Märklin n’a pas été fichu d’implanter un VERROUILLAGE des itinéraires, ce qui est bizarre si l’on pense que c’était déjà partiellement possible avec l’antédiluvien boîtier “Memory”, mais que cette fonctionnalité, au lieu d’être développée, a disparu des CS2/CS3 alors que des tas de gadgets superflus ont été ajoutés. Donc avec la CS2/3 on est dans le bain d’une commande manuelle dépourvue de sécurité, le chef de circulation est entièrement responsable, et ça n’est pas si mal non plus.
Bon week-end, cordiales salutations de Montreux.
Jean
Bonjour Jean La CS2: c’est une excellente machine que j’ai utilisée pendant plus de 10 ans mais sa voie de programmation m’a laché donc achat d’une CS3 (sinon je serais toujours en CS2).
Les hésitations certainement que piloter individuellement les articles se fait aussi bien sans RR et sans CS, en fait, dans ce cas rester en analogique est une solution très valable.
Les triages et manoeuvres Mon vécu est l’inverse du votre, avant RR, les voies de garages étaient peu utilisées et maintenant PAS UNE SEULE voie de garage n’est pas pilotée par RR mais la chaine est différente au lieu de piloter la loco je pilote RR qui pilote le programme demandé
Verrouillage des itinéraires par Märklin Märklin proposait une telle possibilité vers 1991-2005 av ec la 6021 et le memory mais c’était trop compliqué et les utilisateurs n’ont pas suivi.
Verrouillage des itinéraires par RR il est implicite (rien à faire) car RR connait le plan de voie, il propose un ROUTEUR pour créer tous les itinéraires. A l’appel d’un itinéraire, RR verifie la non-réservation des pièces de voie utilisées puis les bascule comme réservées Ainsi aucun itinéraire sécant n’est possible. En fin d’itinéraire (loco arrivée à destination), toutes les pièces de voie réservées sont libérées
A la réflection , la puissance de traitelement d’un PC et d’une CS3 n’ont rien à voir et en plus rien n’empêche d’atteler au PC un grand écran tactile 21 pouces ou plus
J’ai acheté iTrain, parce que RR me paraissait trop compliqué. Mais je ne suis pas plus avancé avec iTrain qui n’est pas non plus adapté à mon réseau. En voie M, je ne peux pas créer tous les cantons nécessaires et, de toute manière, je n’en ai pas la place (1,20 m x 2,6 m).
Je ressens aussi le besoin de commander mes itinéraires et de piloter mes locomotives moi-même. Déléguer la fonction de chef de circulation et la conduite des trains à un ordinateur me gêne.
En voie M tu peux créer des cantons par consommation de courant et donc autant que tu veux
Les modules de rétro sont un peu plus cher mais cela marche très bien
Seul inconvénient un wagon seul ne sera pas détecté mais bon …
Bonjour
J’ai relu ce post et j’en déduit qu’il faudrait une centrale ou un logiciel qui gère tout et qui supporte que l’on vienne foutre le bazar en manuel
Perso je rêve d’un système qui m’ouvre la porte de la pièce ou se trouve mon réseau , qu’il remette dans les boites ou la vitrine ce que je ne pense pas faire rouler , qu’il me prépare les rames que j’ai envie , qu’il enclenche tout ce qui est nécessaire et qu’il m’apporte un café pendant que je regarde mes trains
Oui, je le sais et j’ai les deux.
Le réseau s88 pour les occupations de voie et la détection par “consommation de courant”. Mais je réserve cette dernière pour les impulsions de commande des itinéraires et des signaux.
De plus, je ne roule pas avec des convois de trois wagons. Par exemple mon “Ralpin” compte derrière la 485, la voiture couchettes et six surbaissés chargés de camions. Mes trains blocs (citernes ou porte-conteneurs) ont dix à douze wagons, ce qui ne s’accommode pas de cantons courts. La loco ne voit pas la queue du train, mais presque.
Attention, la “vitesse” disponible sur la CS3 n’est que la traduction du nombre de crans de marche adressés à la locomotive; elle n’a pas grand chose à voir avec la vitesse réelle que le logiciel sur PC calcule lors de l’étalonnage des vitesse; pour effectuer ce dernier, on fait circuler (pendant une procédure particulière) une loco entre deux points (rétro-signalisations) dont on connaît précisément la distance et on mesure le temps de parcours et ce, pour différents crans de marche. Ce faisant, on établi une courbe de vitesse en fonction des crans de marche et on peut calculer la position précise de la loco en mesurant le temps durant laquelle elle roule…
Ceci n’est valable qu’à partir du moment où on peut localiser la loco sur le réseau, ce que fait le logiciel, en partie grâce à cette méthode, et que ne fait pas la CS2/3…