Je me permets de déplacer la question pour ne pas tuer un sujet dans une toute autre rubrique.
Eh bien - non. Comme apparemment ma parle ne te convainc pas, je te renvoie vers
http://centredcc.fr/le-dcc/
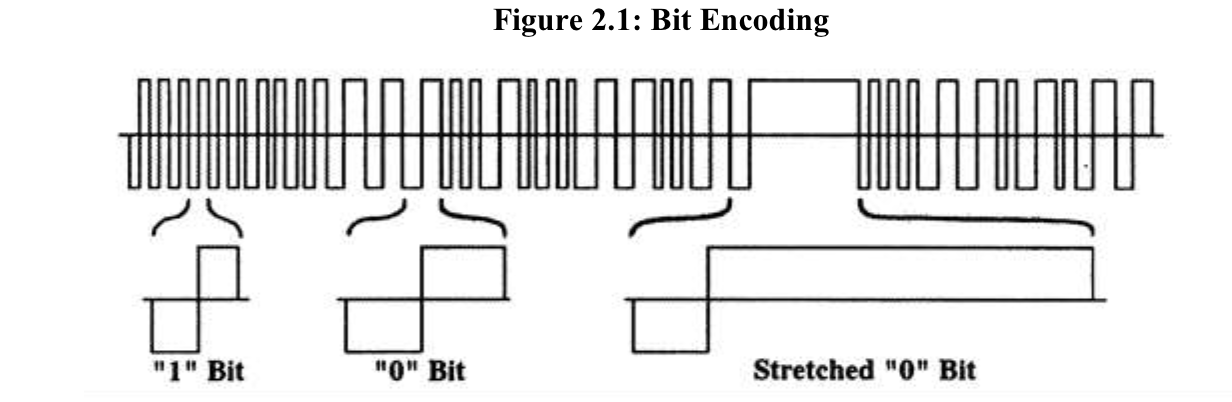
La tension sur la voie varie en permanence entre +MAX et -MAX (MAX dépend de la centrale utilisée, en général MAX = 18 V).
- Un court +MAX suivi d’un court -MAX représente un 1.
- Un long +MAX suivi d’un long -MAX représente un 0.
Les images sur ce site-là le montrent bien. D’ailleurs, si tu branches un voltmètre à cc sur ta centrale DCC, elle affichera 0. La tension résultante, donc la somme de tous les “plus”, moins tous les “moins”, est zéro.
Si tu poses sur les rails une locomotive analogique avec moteur à courant continu, et qui n’a ni décodeur ni inverseur électronique pour système Märklin, elle ne va absolument pas rouler, puisque son moteur est en permanence stimuler avant-arrière-avant-arrière ; et du fait des champs magnétiques qui se forment, elle va chauffer, surchauffer et cramer. Fini.
Effectivement, il y a 40 ans Monsieur Lenz avait proposé un système pour faire fonctionner une loco analogique sur système digital, mais à condition qu’elle roule pratiquement en permanence ou qu’elle soit arrêtée sans alimentation : l’astuce était d’inégaliser le signal, que donc le max(+) et le max(-) n’étaient plus de même valeur, et la différence fait tourner le moteur. Or, plus il fonctionne lentement, donc plus la différence entre max(+) et max(-) est petite, plus le moteur chauffe et risque de partir en fumée ! On a donc très vite abandonné ce bricolage. (Un ingénieur peut beaucoup mieux pour moi expliquer le pourquoi de cet effet, mais le résultat me suffit largement !)
Pour un moteur Märklin classique, c’est différent : c’est un moteur tous courants, il peut fonctionner très bien avec du courant alternatif à fréquence basse (50 Hz est une fréquence basse pour cette classe de puissance), mais aussi avec du courant continu et, mais moins bien, avec du courant alternant à haute fréquence. (Que le DCC ou le mfx n’ont pas de “fréquence” puisque les espacements entre les changements de sens du courant ne sont pas régulier, peut être négligé ici.)
Une petite différence existe pour le bon vieux protocole MM, de première et deuxième génération : contrairement au DCC, il n’est pas symétrique. Il contient plus de temps en “moins” qu’en “plus”, donc la tension résultante n’est pas 0. N’empêche que là encore, c’est très mauvais pour le moteur cc puisqu’il est en permanence stimulé dans les deux sens.
Donc, non, le “courant digital” n’est pas un courant continu.
Et il faut surtout éviter l’amalgame entre “DC” et “DCC” mais aussi entre “DC” et “2 rails” puisque ce dernier induit le néophyte dans le premier.