Comme je l’indiquait sur un autre fil, les problèmes que pose le s88 m’ont amené à travailler sur une rétro signalisation intégralement basée sur un bus CAN et de remplacer les détecteurs s88 par des Raspberry Pico PI.
Les infrastructures de détection déjà existantes sur le réseau sont préservées. Seuls les décodeurs sont remplacés et, surtout, le bus s88 au profit d’un bus CAN beaucoup plus fiable et rapide.
Je précise qu’un Raspberry Pico PI coute en moyenne 5 à 6 € et qu’il dispose de 20 broches « utilisables » ce qui permet de retrouver les 16 entrées de détections d’un décodeur s88.
J’ai programmé la vitesse du bus à 250Kb/s (vitesse retenue par Marklin pour ses bus CAN). Cela autorise un bus d’une longueur totale de 250 mètres !!!
J’ai réglé le cycle de relève des capteurs à 100 millisecondes. Cela veut dire que quel que soit le nombre de capteurs sur le réseau, la centrale sera informée en moins de 100ms de son changement d’état.
Pour assurer un maximum de sécurité et les détections fantômes, ce n’est pas l’évènement de changement d’état du capteur qui est pris en compte mais l’état de l’ensemble des capteurs qui est renvoyé à la passerelle CAN ↔ TCP, comme le fait d’ailleurs le S88. C’est la passerelle qui se charge de vérifier si des états ont changés et de communiquer alors cette information à la centrale.
J’ai testé le fonctionnement sur Rocrail et la prise en compte de modifications d’états des capteurs est très rapide et fiable.
Je vais maintenant réaliser un PCB le Raspberry, les composants CAN etc… pour faire un ensemble propre et fiable.
Voilà donc je crois, avec le pilotage des locomotives + la rétro signalisation, un ensemble assez complet pour tous ceux qui n’ont qu’une MS2 et sa Gleisbox. Et qui répond aussi je crois à l’ambition qui était posée au début de ce fil.
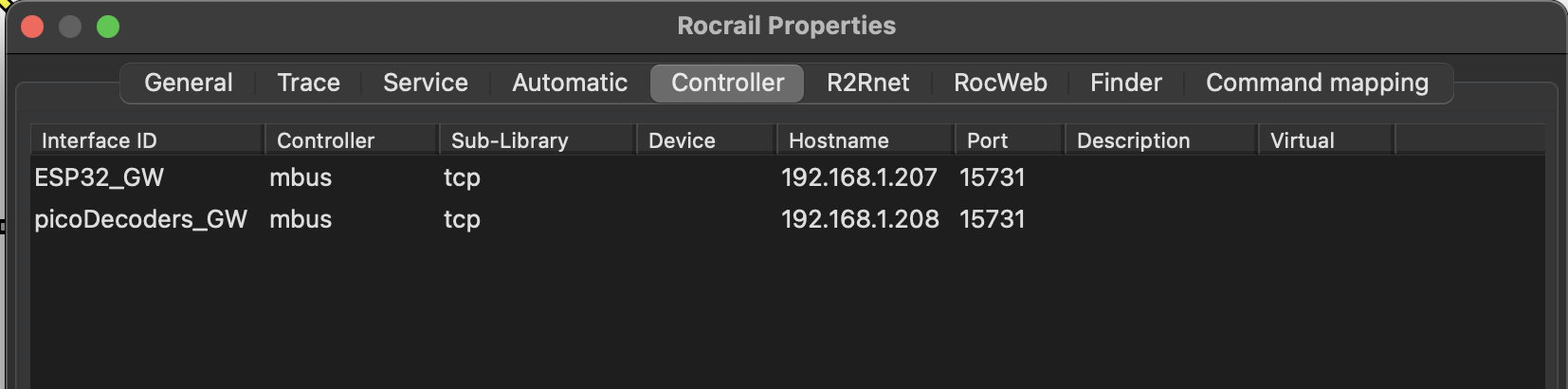
J’avais déjà montré que dans Rocrail, les réglages sont les mêmes que pour se connecter à une CS2 / CS3 et que le protocole est celui de Marklin, le mbus.
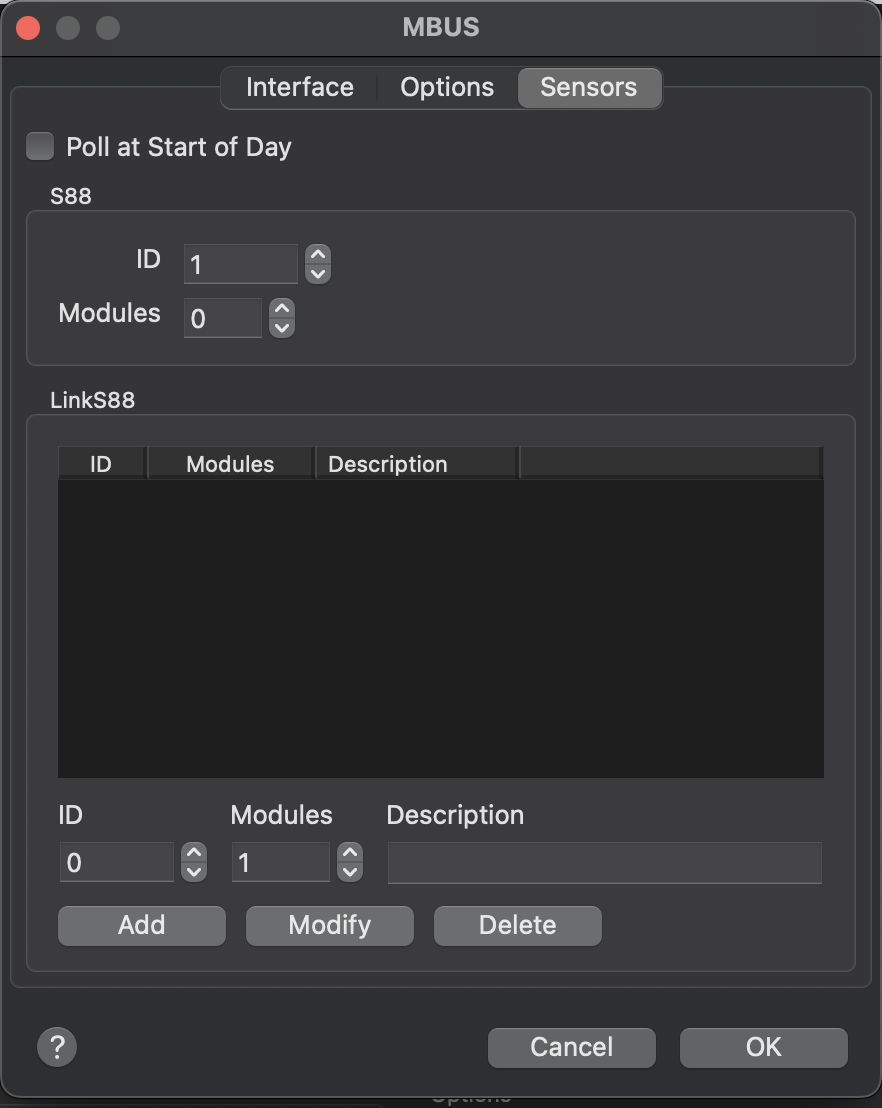
Pour établir la liste des capteurs, il faut reprendre la même procédure qu’avec un Link 88.
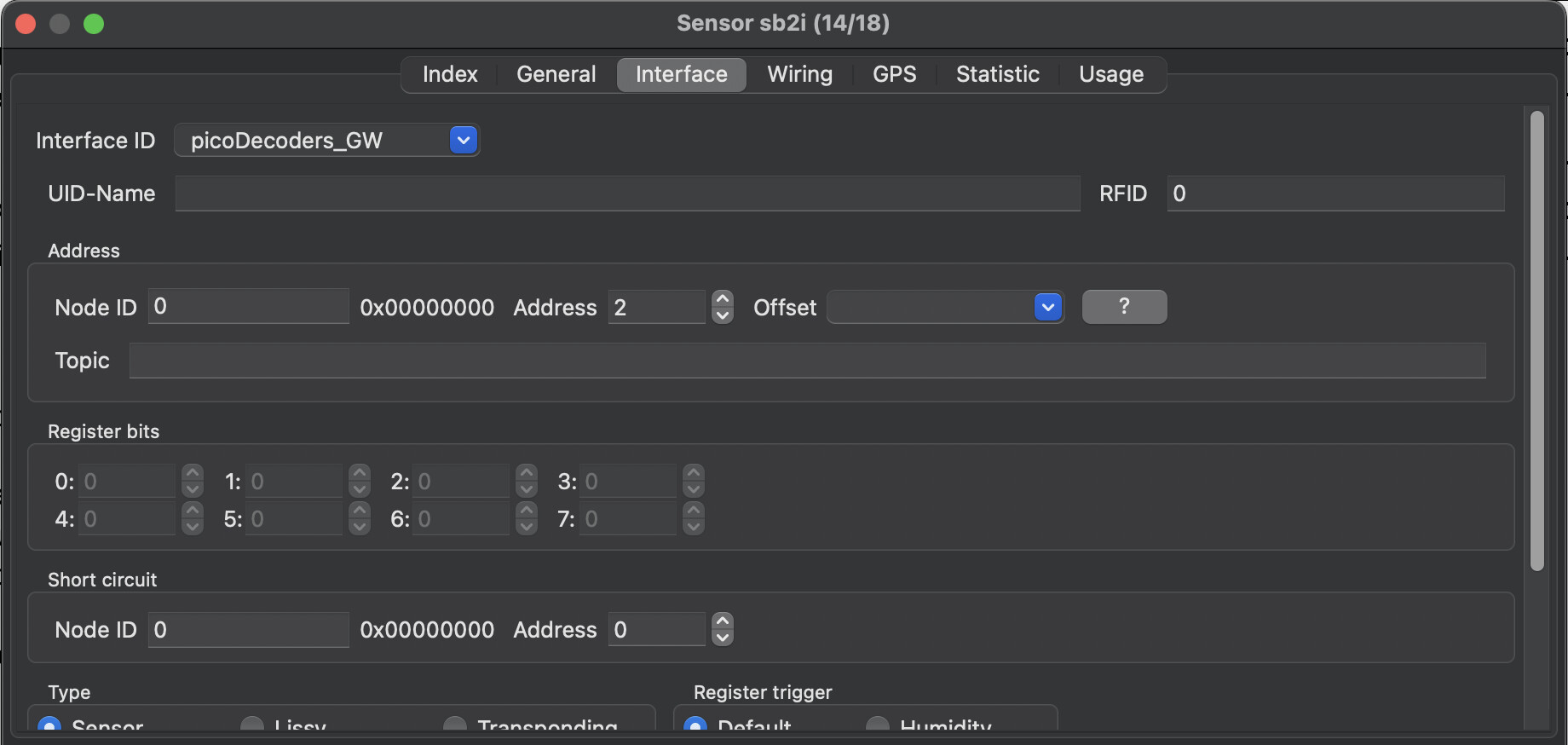
On choisit l’interface (ici picoDecoders_GW), on renseigne le n° du nœud (ici le 0) et la position du capteur sur le décodeur (ici 2). Et c’est tout.
Le programme pour les décodeurs est ici GitHub - BOBILLEChristophe/picoDecoder_to_rocrail_GW
Le programme pour la passerelle est ici GitHub - BOBILLEChristophe/picoDecoder_to_rocrail_GW
Bon jeu à tous
Christophe