Bonjour Philippe et bienvenue sur 3 Rails
Tu ne veux pas utiliser de S88, et pourtant il faut s’en inspirer.
Pour un seul contact tu peux reproduire l’entrée d’un S88. La puce derrière a les mêmes caractéristiques que l’Arduino. Il faut deux résistances, un petit condo et une entrée sur Arduino par contact.
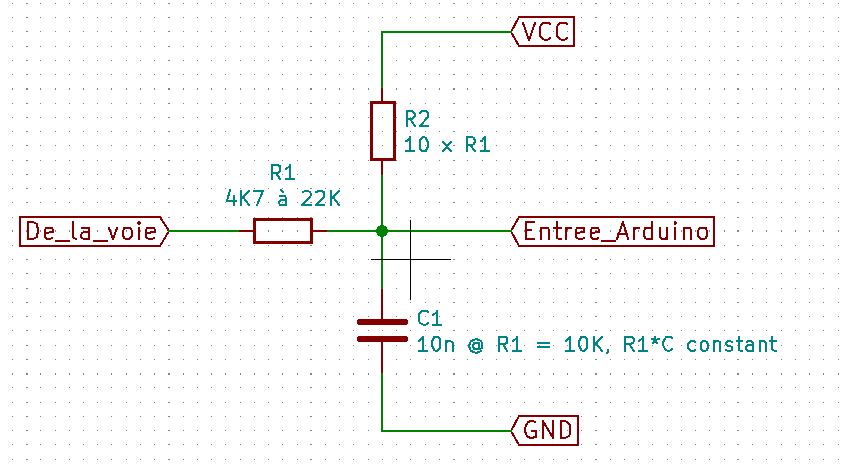
La résistance d’entrée (R1) protège l’Arduino des tensions du signal digital. Mettre une valeur basse plus basse que 4K7 risque de cramer l’Arduino en cas de contact entre les picots et le rail de détection.
La masse de l’Arduino doit être connectée à la masse des voies (le fil brun, ou marque ‘O’ dans le système Märklin).
Tu peux aussi ajouter les deux diodes tel que recommandé pour les S88.
Si il y a plusieurs contacts à lire, l’Arduino doit facilement pouvoir interfacer le bus S88 au moyen du SPI. Je rechercherai les détails au cas où cela intéresse. (Mais je ne garantis aucun délai).
Avec cela tu peux utiliser la détection par rail isolé, la plus adaptée dans ce cas.
Bonne suite
Sylvain