Que pensez-vous de l’idée de piloter vos aiguilles Marklin voie C avec des servos moteurs ?
Il est tout à fait envisageable de commander un Arduino ou un Raspberry Pi Pico avec un décodeur et piloter ainsi jusqu’à 4 aiguilles par décodeur. Soit en DCC avec un m83 ou mieux et plus simple avec un k83 en commande directe. Il est aussi possible de piloter 8 voire 16 aiguilles avec le même microcontrôleur pour peu que l’on ajoute des k83.
Plus simplement, les servos moteurs pourraient aussi être pilotés au travers d’un bus CAN par une CS2 /CS3 mais ce n’est plus du s88.
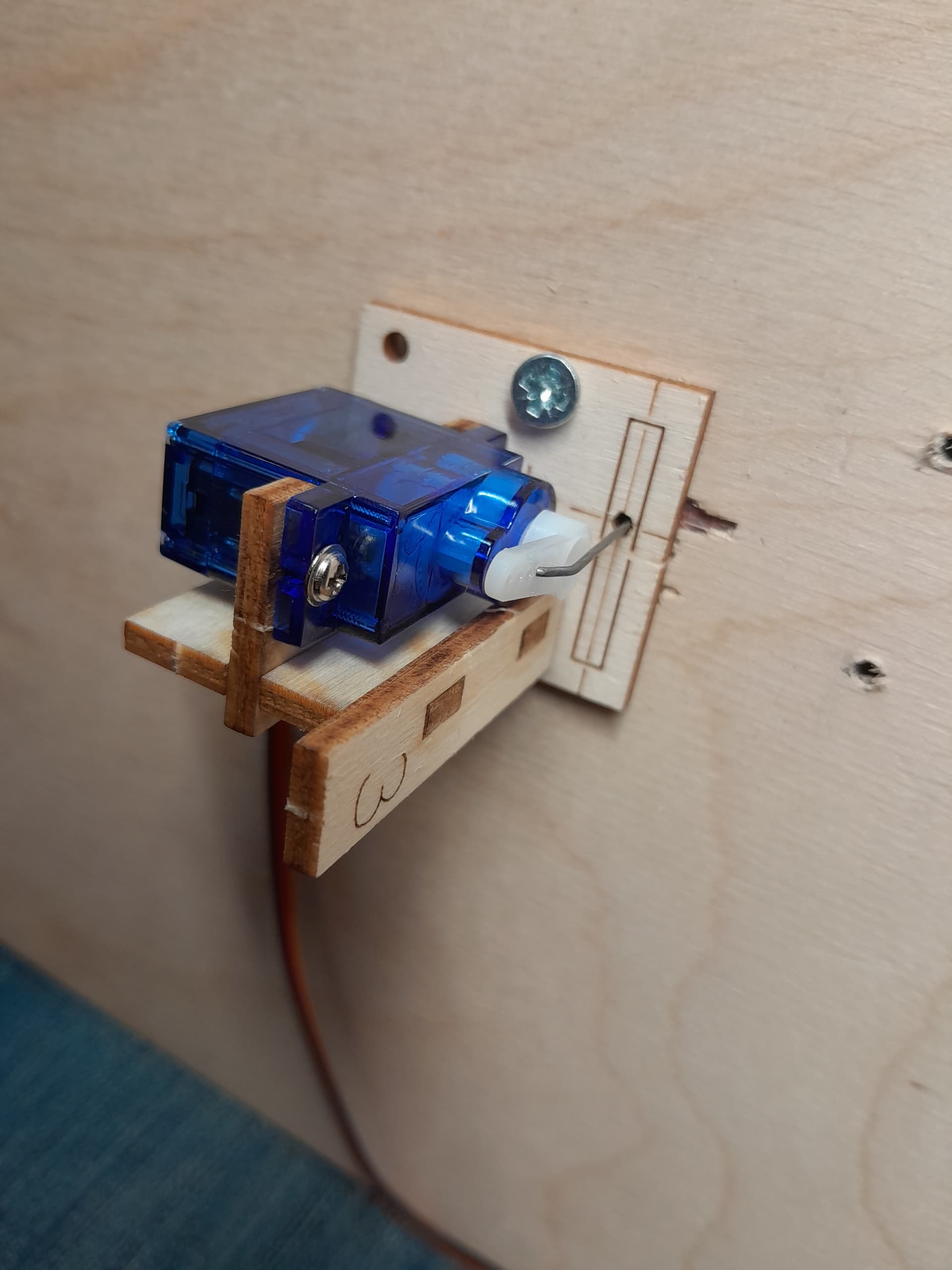
Le positionnement du servo sous la planche est aisé pour peu que l’on se soit fabriqué un gabarit de perçage, dessiné ici sur Fusion360 et réalisé en découpe laser. Les traits autour du balast ne sont là que pour montrer l’ajustement parfait de l’aiguille.
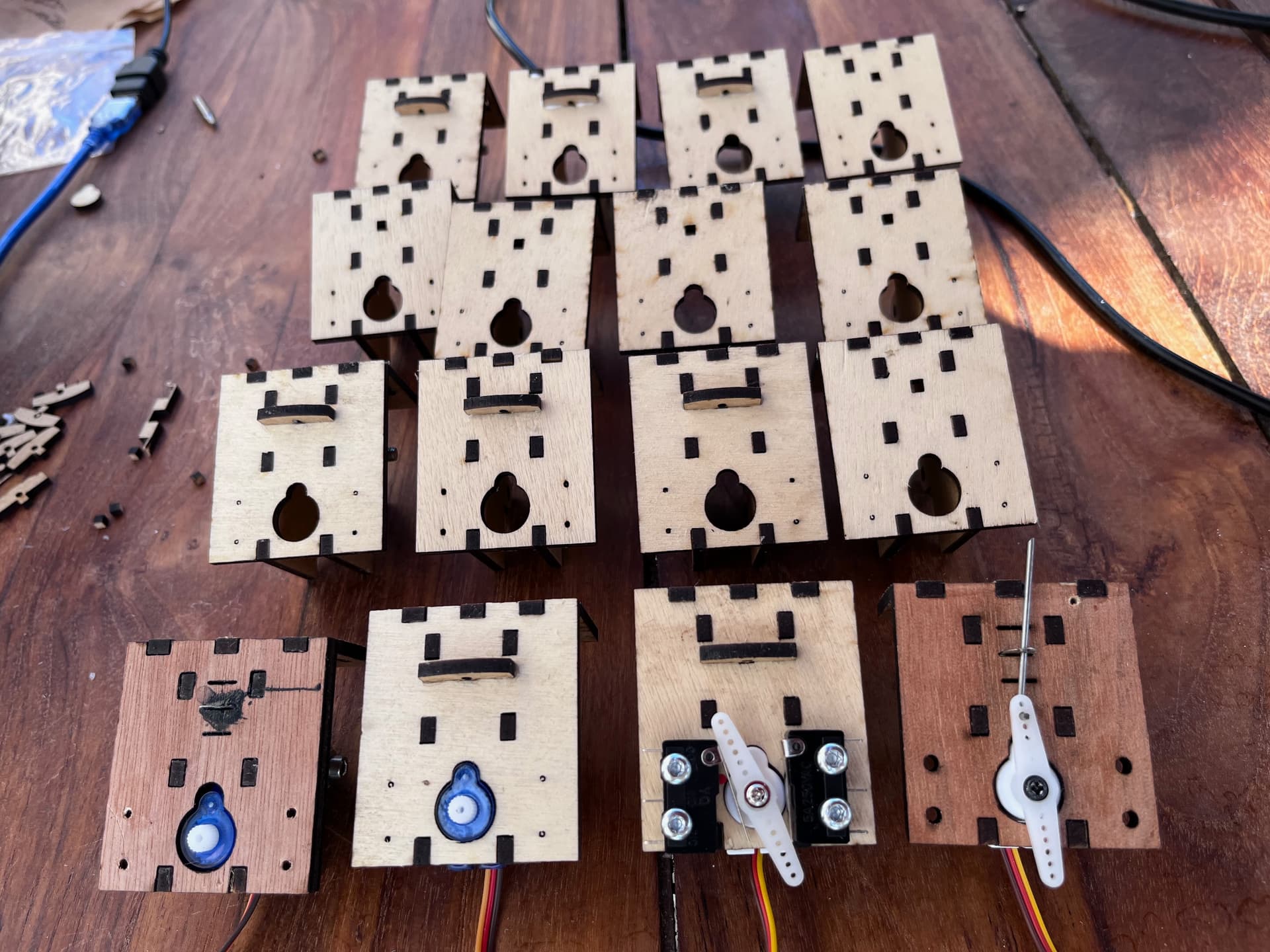
Ce WE, j’ai poursuivi mes tests pour commander des aiguilles avec des servos-moteurs pour de la voie C mais également pour de la voie non ballastée (K ou Peco par exemple) en réalisant des supports de servo en découpe laser…
Je dispose l’aiguille sur une platine et je monte l’ensemble hors du réseau afin de faciliter le montage et les réglages.
Avec la découpe laser, il est possible de réaliser les avant-trous aux diamètres et aux emplacements avec une précision de l’ordre du 1/10 de millimètre. Je reproduis également le pourtour de l’aiguille pour faciliter le positionnement
C’est vraiment du bon boulot Christophe, super propre et précis.
J’ai quelques questions si tu me le permets:
Quelle est la profondeur de cette installation sous le plan ? A vue de nez, je dirais 5cm mais l’échelle peut etre trompeuse sur la photo.
Quelle est cette petite piece en métal traversée par la corde a piano, qui sert de pivot ? Elle semble etre cruciale pour transmettre correctement le mouvement longitudinal au servo.
Concernant le micro-controlleur, tu disais plus haut:
Et la je suis un peu perdu…
D’apres ta vidéo, ton micro-controlleur permet de controler 4 servos. Est-ce un choix de ta part ou une limite physique du micro-controlleur ?
Est-ce que tu veux dire plus haut que:
-1 sortie du k83 (une sur les 4 disponibles par boitier) permet de commander 1 micro-controlleur, et ce dernier controle ensuite 4 servos?
-Le k83 est lui-meme commandé via MS2 ou CS ?
J’ai du mal a me représenter comment ce montage se connecte dans son ensemble
La hauteur exacte est 50 mm, la largeur 45 mm et la profondeur 40 mm. Dans le cas ou la hauteur constituerait un problème, je pense qu’une solution “à plat” peut être envisagée. Sans les capteurs de fin de course alors mais ceux-ci ne sont vraiment pas indispensables.
La petite pièce en métal est effectivement le pivot de la corde à piano.
Je vois que tu es un fin observateur. Oui en effet, la carte que tu vois sur la vidéo peut piloter 4 servos. En fait, j’ai pris ce que j’avais sous la main. C’est une carte satellite qui réalise de nombreuses fonctions de détections et de commandes.
Si tu es un peu perdu c’est simplement parce que de plusieurs usages sont possibles, par exemple :
Installer sur le microcontrôleur un programme de décodage de trames DCC et ainsi commander les servos à partir de commandes envoyées par une CS3 en digital DCC
On peut aussi le faire avec un k83. Le microcontrôleur reçoit alors une commande 0 ou 1 comme pour un solénoïde par exemple. Le programme interne au microcontrôleur transforme cette commande en commande de servo. C’est ce que fait la carte satellite. Le k83 est effectivement commandé via MS2 ou CS
Mais j’ai déjà beaucoup dit de ma désaffection pour l’utilisation du bus DCC ou du S88 pour les commandes d’accessoires et la détection auxquels je préfère et de loin le bus CAN. D’autant plus si c’est Rocrail qui est le gestionnaire.
Tu vois donc qu’il y a de nombreuses possibilités. Mais je recommande surtout le CAN avec un Raspberry Pi pIco ou un ESP32, d’autant qu’il y a une logique plus globale à l’utilisation du CAN dans le concept de satellite.
A défaut de posséder une découpeuse laser, je m’intéresse aux “servo mounting brackets” dispos sur le marché, à faibles prix. Conçus pour le matos 2 rails type Peco etc.
£2 la pièce, ou £4 avec servo SG90/vis/corde à piano. Cela fonctionne bien mais nécessite d’être plus éloigné du plan que prévu d’origine pour augmenter l’amplitude de la corde à piano. Profondeur sous le plan une fois modifié: 3.5cm.
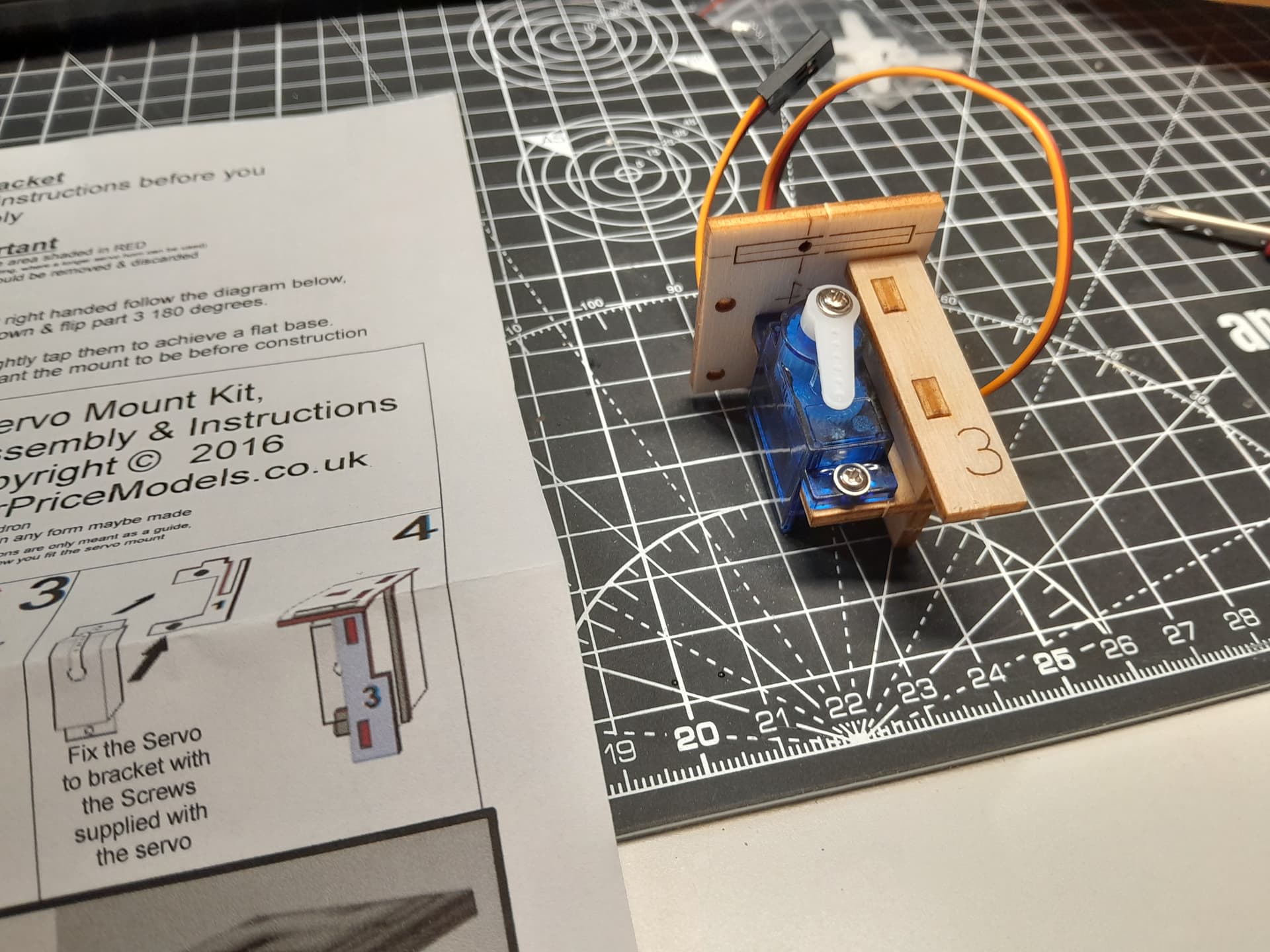
En voici un autre, arrivé en kit, plus sophistiqué mais aussi un peu plus cher: £7 pièce, sans servo.
Les instructions sont téléchargeables et très complètes. Facile à monter, faut juste éviter de plier l’alu dans le mauvais sens, un seul essai permis avec ce matériau…
Bon résultat aussi, encore faut-il s’appliquer pour le positionnement - ce qui peut être un peu galère in situ. J’ai également du renoncer aux micro-switchs de fin de course qui restreignaient trop la course justemment (cad blocage physique de la course).
Profondeur: 4cm sous le plan.
J’en attends un dernier pour test, en bois découpe laser comme celui confectionné par Christophe.
Et un dernier, £1.20 la pièce. 4.4cm de profondeur mais peut être réduite à 3.5cm si on renonce au micro-switch. Montage enfantin, 4 pièces en bois à coller.
Je pense que c’est celui qui fonctionne le mieux de 3. Je vais l’essayer avec d’autres aiguilles 24611 ou 24711, pour être sûr.
Bilan: toutes les solutions essayées fonctionnent sur voie C. Certaines sont plus exigeantes que d’autres pour le positionnement. Le dernier m’a vraiment emballé.
Maintenant, je vais m’interesser à la commande des servos via micro-controlleurs…
Les “servo mounting kits” sont dans l’ordre: RK Education (alu) / Dingo Micro10 V2 (kit alu, lasercut) / FairPriceModels (kit bois, lasercut). Etant réalisés en UK, je doute qu’ils soient distribués sur le “continent”. Mais il est certain que des équivalents existent en France, Belgique, Suisse etc
On voit tout de suite que ce sont des réalisations de passionnés, la qualité des notices d’assemblage est excellente. Le kit bois a 1,2 balles inclue les instructions en impression papier couleur: de toute évidence ils ne cherchent pas a marger
le montage est très propre et net et certainement fonctionnera plus surement que les moteurs prévus par la marque.
Mais connaissant un certain nombre de réseaux (mais pas en voie C) où l’utilisation de servo-moteurs a permis un mouvement lent et continu des pointes, j’avoue ma surprise en voyant que le saut inhérent à la mécanique Märklin est conservé.
Je ne connais pour ainsi dire pas l’intérieur des aiguillages voie C, mais est-ce qu’il est imaginable de contourner ce système par leviers coudés et ressort pour arriver à un mouvement lent et continu - comme en réalité ?
C’est normal et c’est possible de supprimer cet effet indésirable. J’en parle avec un kit servo moteur que j’ai mis en œuvre … le temps de retrouver mon poste !
Oui c’est possible en supprimant le mécanisme de ressort comme je l’ai fait sur les aiguille Peco en 2R et que l’on voit à la fin de la vidéo. Mais pour les matériels Marklin, j’évite de présenter trop de charcutage, ça me vaut parfois des réactions , disons peu sympatiques !
Ce n’est pas un charcutage (je suis spécialiste du sujet mdr), c’est juste un ressort à enlever et on peut le remettre plus tard sans soucis.
Je suis la première à charcuter très régulièrement la voie C et on ne m’en n’a jamais fait le reproche ! Au contraire, je milite pour ça
Je rentre en france dans quelques jours et j’espère me remettre un peu à la maquette. Ça me manque et je vais regarder de plus près tout ce que tu as produit. C’est génial
Le comportement me satisfait totalement. Il faudra soigner l’esthétique au moment de la finition.
Le servo est maintenant déporté par rapport à l’aiguille et manœuvré par une petite tringle. Cela a de nombreux avantages. Le principe revient à ce que j’avais montré avec de la voie C.
Super, c’est vraiment très propre cette solution découpé au laser.
As-tu des photos plus détaillé de la modification faite sur l’aiguillage voie C en lui même ?
Je n’ai fait aucune transformation sur l’aiguille C. D’où mon petit clin d’œil avec @Julaye plus haut sur le “charcutage”. J’ai juste retiré le petit levier (qui est amovible) pour mettre la tige du servo à la place.
Ce qui pourrait être fait sur l’aiguille si l’on souhaite un mouvement lent serait d’enlever les ressorts Julie dit que c’est revesible…
Pour ce qui est du cout de revient, c’est imbattable, à peine 0,10 ou 0,20 € de bois et pour les servos, je viens d’en acheter 10 nouveaux de qualité pour 17€ !
Reste bien sur que ceci est piloté par un microcontrolleur, 7 à 8€ plus la quinquallerie et les fils.






 ou voie sans ballast de type K ou 2R (Peco…).")