Bonjour Claude,
Merci pour tes questions en vrac, elles sont très intéressantes pour compléter ce petit tutoriel. Allons-y l’une après l’autre.
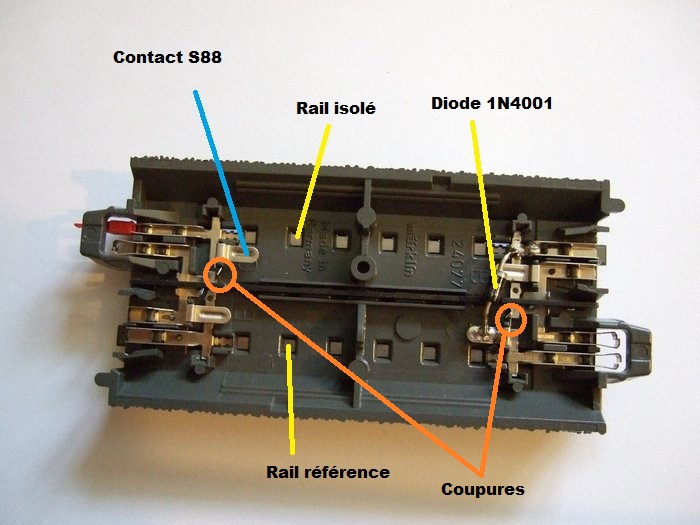
J’ai fait un montage similaire à un rail à contact : les plots centraux (ou le rail central pour la fosse) sont connectés au B (Bahn) et l’un des deux rails est connecté au O. L’autre rail est effectivement un fil bleu sur lequel on va détecter la présence d’une tension lorsque qu’un essieu aura établi un contact entre les deux rails (en 3 rails les essieux sont conducteurs). Bien évidemment les deux rails sont isolés en amont et en aval.
Voir le maintenant classique montage avec une éventuelle diode de protection contre les retours de courant :
Tu peux voir aussi le montage que j’ai fait pour la fosse d’inspection ici : Une débutante dans le décor - Ep4 - Kitbashing d’une fosse d'inspection - #36 par Julaye
L’Arduino (tous modèles) se programme en un langage C / C++ (au contraire du Rasberry Pi qui se programme en Python). Parce que le C est le langage le moins gourmand en ressource et particulièrement efficace pour le petit embarqué contraint avec des tailles mémoires petites et des puissances de calcul limitées.
En C et C++, // marque une ligne avec un commentaire et /* */ encode une section de commentaires. Pour ma part, je n’utilise que le //.
Les autres lignes sont du source en langage C / C++ qui est transformé (on dit compilé) en code binaire exécutable par le logiciel Arduino de ton PC (ou de ton Mac), code téléchargé sur la carte pour être exécuté.
Il te faut un relais qui se commande en 0-5V. Arduino propose du double - canal (en réalité c’est une carte avec deux relais indépendant). En fonction de ton usage que je devine, il faut plutot un relais 2RT, et on en trouve en 0-5V pour la commande.
Oui la documentation est très complète : toutes les fonctions de base et les fonctions en bibliothèque (ou encore appelée la librairie qui n’est chargée sur la carte que si besoin).
Tu peux commencer avec ce lien :
Pour chaque fonction comme digitalWrite(), une explication détaillée des paramètres et de la fonctionnalité avec un ou plusieurs exemples d’utilisation.
L’Arduino possède beaucoup d’entrées digitales et certaines peuvent être utilisées pour recevoir des ordres depuis un M83 ou M84, en entrée Pull-up. C’est comme ça que j’ai mis des commandes de forçage allumé / éteint pour mes fosses depuis ma MS2.
L’étape suivante est de faire discuter l’Arduino avec la centrale (ou la mobile Station), en protocole Motorola ou DCC. Mais ceci est une histoire un peu plus compliquée que tu peux trouver sur un site dédiée : https://www.locoduino.org
Ici, je me contente d’utiliser l’Arduino pour réaliser des petits automatismes sympa pour pas cher.
Je vais même rappeler l’esprit de mes tutoriels Arduino : je souhaite utiliser l’Arduino comme petit automate sans utiliser de fer à souder : uniquement des petits modules pas chers que je connecte entre eux autour de cet Arduino Nano, comme un “lego” électronique.
Au besoin, il est toujours possible de prendre une sortie d’un M83 ou un M84 pour lancer une séquence d’un automatisme particulier, par exemple. J’aime bien le M84 configuré en mode 2, il permet d’avoir jusqu’à 8 commandes pull-up par exemple pour autant de fonctions digitales sur l’Arduino.
Mon prochain tutoriel avec un Arduino sera justement de remplacer un servo contrôler horriblement cher de chez Faller pour commander jusqu’à 6 servo moteurs avec cette petite carte de 5 € … (ça marche déjà sur mon petit bureau de Dakar). Et réaliser des petits automatismes du style la locomotive approche, la porte de la remise s’ouvre. Et avoir quand même une commande ouverture de porte depuis un M84.
A suivre,