Bonjour à tous. Je possède une CS3 que je contrôle avec mes “gros” doigts, pas toujours très précis…
Pourrait on utiliser un stylet, est-ce l’un ou l’une d’entre vous utilise ce genre d’accessoire et de quelle marque ?
Merci pour votre retour,
cnson
Cela ne marche pas bien avec un stylet.
L’écran est conçu pour une utilisation tactile.
Il vaut mieux alors utiliser une souris filaire, il y a un port à l’arrière pour cela.
Bonjour
j’utilise une souris sans fil. Kit souris, clavier et dongle USB à 8 €. Le clavier est lui quasi inutile: peu de texte à insérer et surtout, non reconnaissance du type de clavier (interprété comme clavier Allemand).
La souris est indispensable pour la création du synoptique.
Amicalement
Jean
2 « J'aime »
Tout comme Jean, je suis passé à la souris sans fil, la solution optimale.
La souris filaire, c’est limite et le fil gavant à la longue.
J’avais essayé le stylet de mon ECOS50200 mais c’est vraiment aléatoire et le résultat en utilisation pas terrible.
Laurent
Bonjour
Comme je pense aussi acheter une CS3 j’ai deux questions :
-
Un écran deporté ou l’écran de la CS3
Et donc peux t’on la brancher à un ordi disposant d’un grand écran ? -
si on veut utiliser la CS3 seule ( sans logiciel type Rocrail ou iTrain ) j’ai vu qu’on peut programmer des itinéraires mais est ce qu’elle gère aussi le freinage devant un signal ou en entrant dans une gare
Merci ![]() d’avance
d’avance
Bonjour Francis
C’est vrai, l’écran de la CS3 n’est pas très grand et on peut le déporter sur un PC avec grand écran en utilisant le VNC Reader (s/w gratuit à télécharger).
Gestion du freinage
- le mieux est d’utiliser Rocrail
- utiliser les modules de freinage Märklin mais cela revient vite assez cher et impose un cablage très lourd (un ou deux ça va mais dans mon cas avec plus de 100 blocks, ça ne vas pas.
- utiliser une CS3 mais uniquement dans un circuit avec une seule loco car la CS3 ne gère pas les emplacements des locos / trains et ne sait pas vers quelle loco envoyer un ordre d’arrêt.
Notes sur les logiciels (s/w) tels que Rocrail
- oui il faut lire la doc et aller pas à pas
- oui, il faut entrer dans le PC tout le réseau (représentation synoptique)
- normalement, le s/w envoie un ordre de vitesse réduite à l’approche lointaine d’un signal fermé et un ordre d’arrêt devant le signal.
- il n’est plus besoin d’avoir des sections isolées d’arrêt: simplification du cablage
- et bien d’autres choses à voir plus tard
Dans le cas de Rocrail, si on dispose d’un PC (IOS, Windows, Linux) dans mon cas (CS3), il ne faut qu’un cable Ethernet (CAT5) et la contribution financière et le montant qu’on veut (0, 12€ ou plus) et quand on veut (tout de suite, après l’essai ou jamais si on est radin).
Voici l’état de mon réseau un an après que j’ai commencé à utiliser Rocrail (à l’époque avec une CS2)

Amicalement
Jean
Bonsoir Francis,
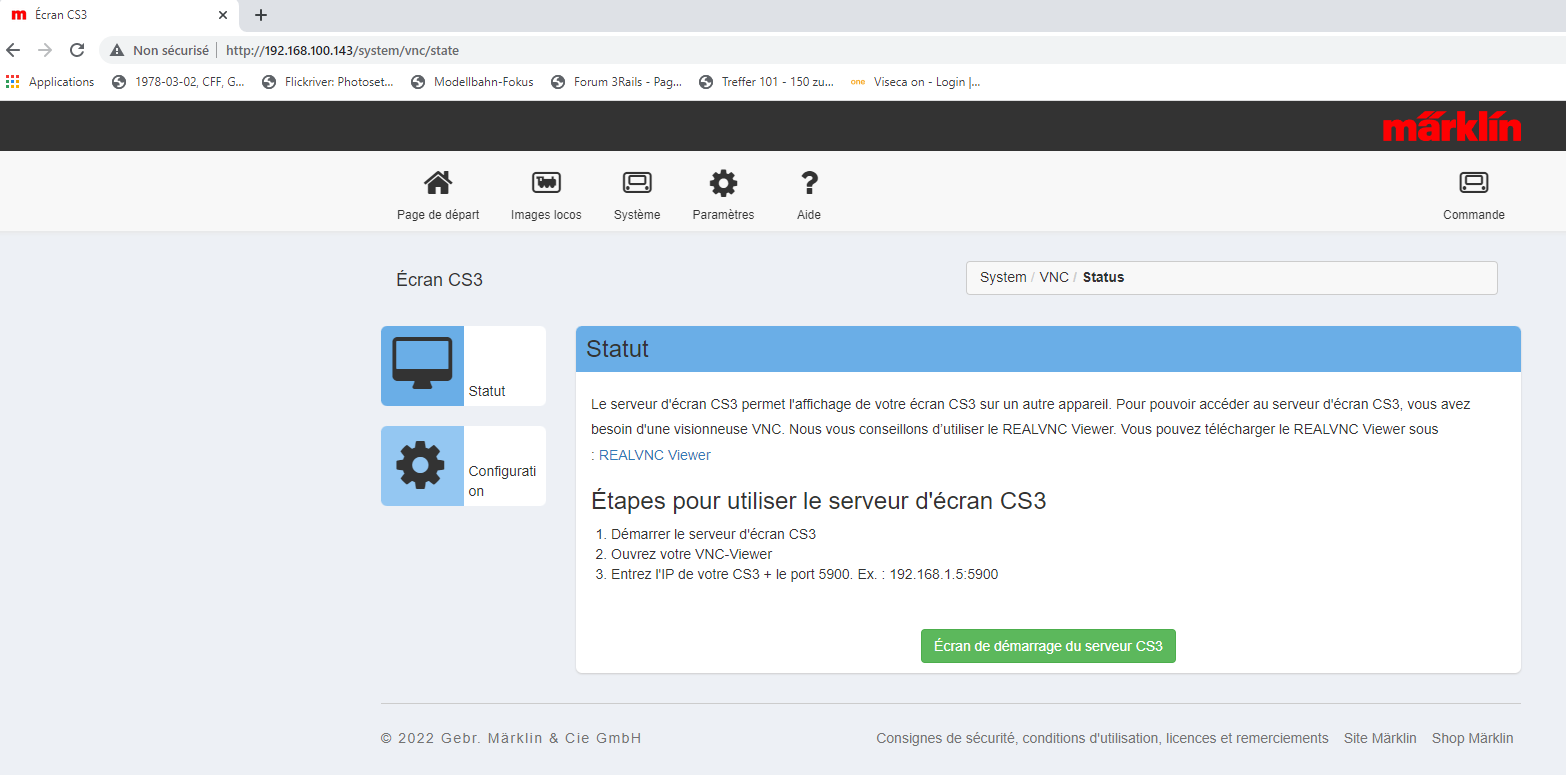
Oui, il est tout à fait possible de déporter l’écran de la CS3 sur l’écran d’un ordi. Pour cela, il existe 2 possibilités: via l’interface web de la CS3

ou via VNC comme l’a mentionné Jean
Il faut dans un premier temps lancer le server d’écran sur la CS3
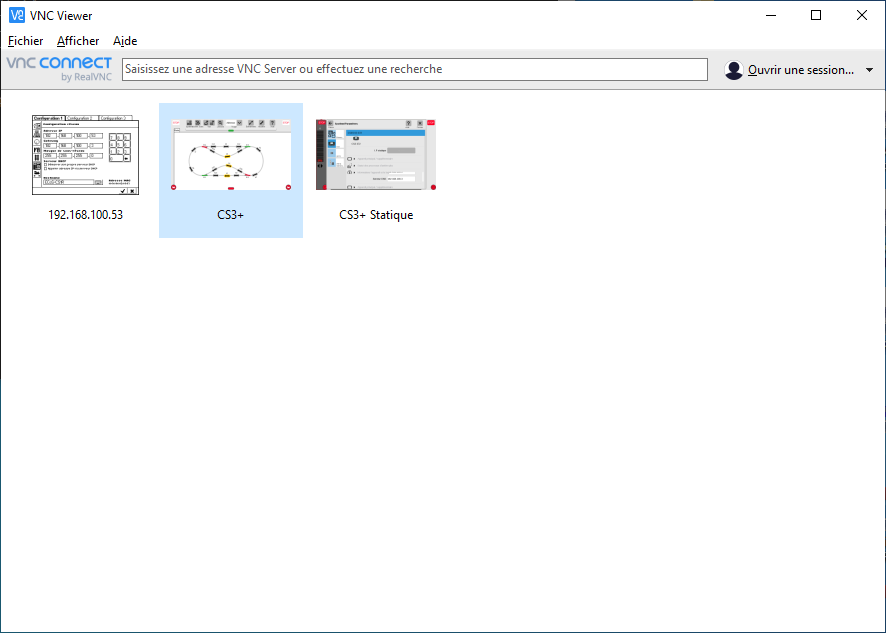
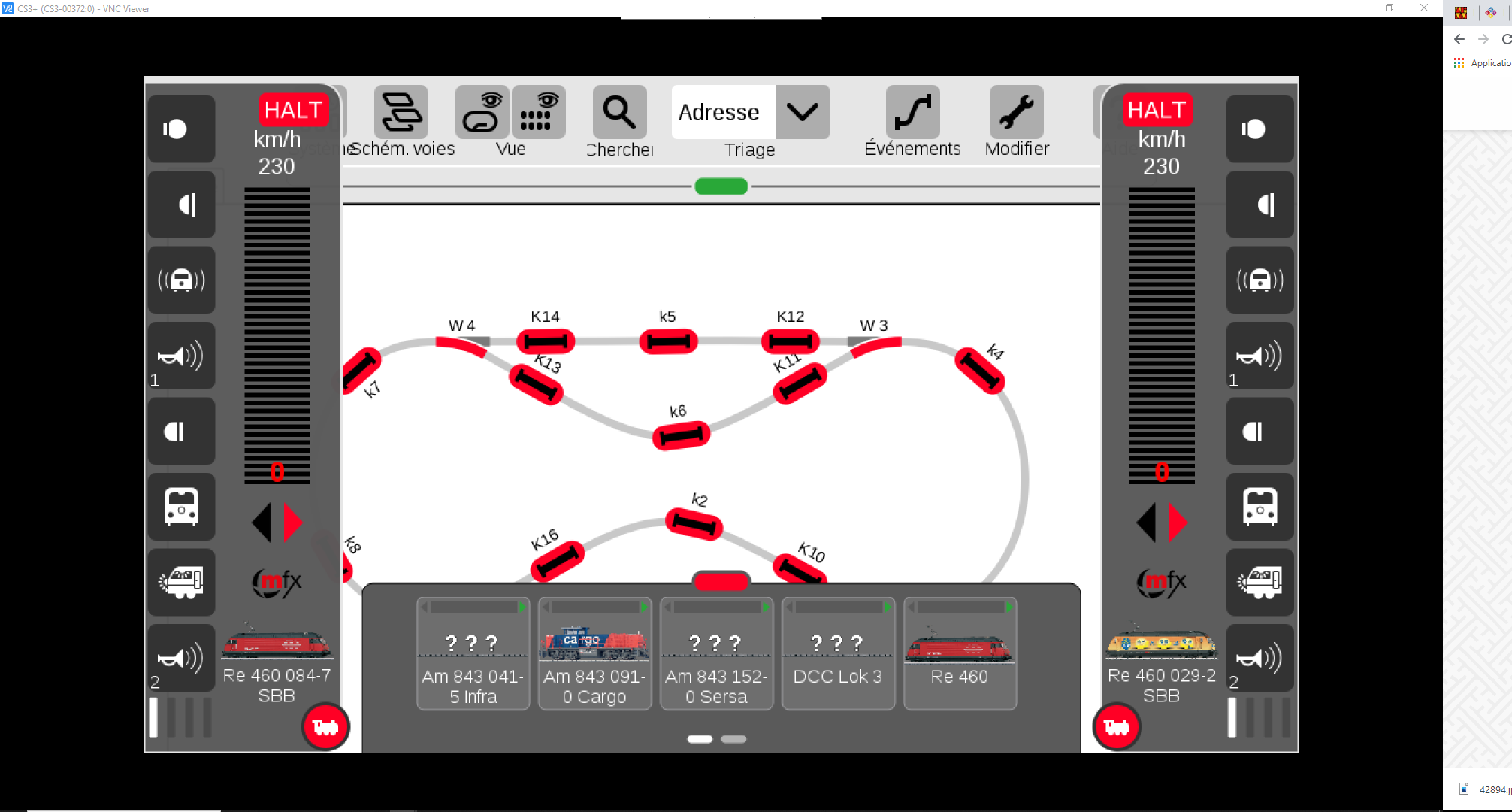
Puis démarrer VNC
Il est possible de créer des itinéraires complexes avec la CS3, mais ça peut vite devenir fastidieux en fonctions du nombre de locomotives que l’on veut faire circuler en même temps.
Par contre, pas de problème pour arrêter une locomotive avant un feu ou en gare, sans utiliser les modules de freinage Märklin.
Cependant, il faut avoir à l’esprit que chaque locomotive doit avoir un itinéraire
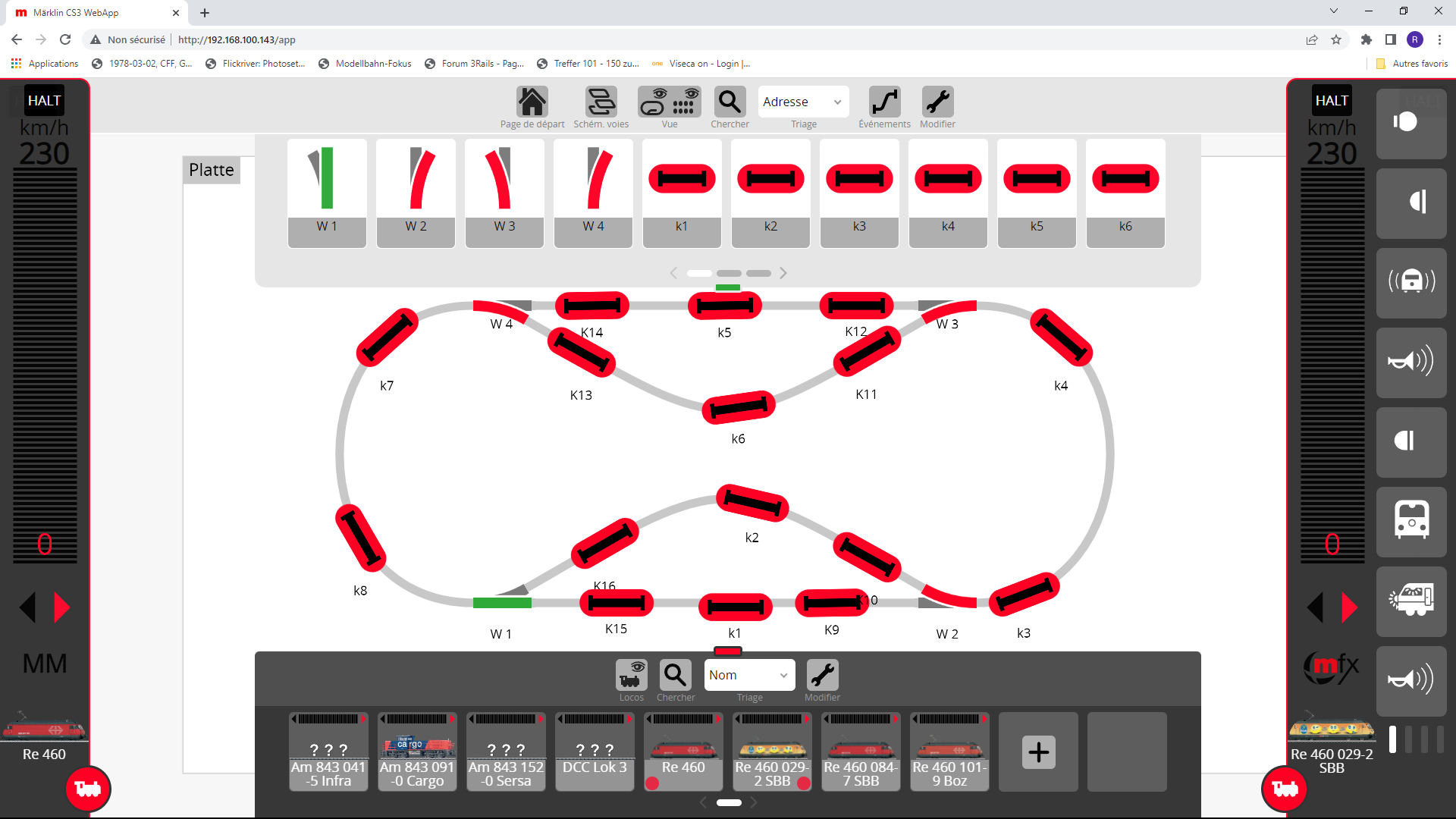
Ci-dessous un petit aperçu des événements de mon réseau de démo que j’ai réalisé pour un tuto et
qui permet à 3 locomotives de circuler sur cet ovale, muni de 4 aiguillages et de 16 contacts de rétro-signalisation, en s’arrêtant sur les voies prévues à cet effet.
Le nombre d’itinéraires est quasiment illimité, mais pour commencer, il est préférable de tester avec un schéma simple, comme pour mon réseau de démo, afin de bien assimiler les principes de base.
A+
Roland
2 « J'aime »
Bonjour, on peu trouver ou ton tuto ? Merci
Ce que veut dire Shun, c’est :
“Bonjour, où peut-on trouver ton tutoriel ? Merci d’avance.”
1 « J'aime »
Hello
Merci beaucoup ![]() pour vos réponses
pour vos réponses
Juste pour être sûr de comprendre si on affecte une loco a un itinéraire point A vers point B la loco va t’elle s’arrêter au point B en ralentissant ou stopper net ( plus l’inertie )
Et autre question si Rocrail il faut paramétrer tout ( aiguillages cantons etc )dans les deux ( CS3 et Rocrail)?
J’arrête là avec mes questions …
Juste stopper net + inertie éventuelle augmentée du powerpack éventuel.
Pour Rocrail, je ne sais pas répondre. Mais j’aurais tendance à répondre oui ( ce sont deux interfaces distincts ).
Bonjour Francis
Sur une CS3, un évènement (il n’y a pas d’itinéraire) est une chaine de commandes. Par exemple Signal x au vert, loco y en marche avant, vitesse v, etc.
Cette chaine est déclenchée par un rail de contact (automatique) ou un bouton (manuel).
C’est VOUS qui allez organiser la séquence automatique
Restriction: la CS3 ne sait pas où se trouve chaque loco et donc ne gère pas le déplacement des locos
Par contre, CS3+Rocrail (RR), sait où se trouve chaque loco. RR “connait le réseau”: quel chemin pour aller du block Bk1 au Bk2 (comment positionner les aiguillages et.ouvrir / fermer les signaux
Comme RR sait où se trouve chaque loco, si le Bk1 est au rouge une loco s’approchant sera détectée et RR enverra un ordre de ralitissement, puis d’arrêt à la loco specifique s’approchant du Bk1 (ce que la CS3 ne sait pas faire toute seule). Il en résulte qu’avec RR, les zones isolées des signaux sont INUTILES (cablâge simplifié).
Il en résulte, avec RR, qu’on peut envoyer un train vers une destination par “Drag and drop” (sélectionner et tirer).
Les signaux ne sont là que pour l’aspect (cosmétique) donc pas de signaux au début ou dans les zones invisibles (forte économie)
Faut-il paramétrer tout avec RR?
- RR doit connaitre impérativement le réseau (les liaisons entre blocks et les aiguillages le permettant. Il doit également connaitre chaque loco (adresse, protocole)
- RR dispose d’un certain nombre de paramétrages FACULTATIFS. Pas d’obligation mais alors fonctionnement moins sophistiqué
- Exemple de paramètres facultatifs: les longueurs (des locos, des trains, de chaque block). Ainsi en ayant ces paramètres RR n’enverra pas un train vers un block trop court.
- autre exemple de paramère facultatif: le type de train (navette, local, express, marchandises, électrique, vapeur, diesel)) associé avec des particularités d’itinéraires ou de block permettant - par exemple - de ne pas envoyer une loco électrique dans une voie sans caténaire.
Habituellement, l’approche est de démarrer avec seuls les paramètres indispensables (le réseau, les loco)
Amicalement
Jean
Bonsoir Francis,
Non elle ne va pas stopper net, car sur mon réseau de démo, je n’utilise aucune coupure d’alimentation, juste des contacts de rétro-signalisation et des événements par locomotive (s’arrêter, accélérer, ralentir, etc) exactement comme le fait un logiciel de pilotage, à la différence que pour ce dernier, il n’y a pas besoin de définir les événements par locomotive.
Si j’ai le temps ce week-end, j’essaierai de réaliser une petite vidéo pour montrer à quoi ça ressemble.
@Shun et à Pierre
Pour le tuto, je ne l’ai jamais rédigé. C’est en voulant le faire que je me suis aperçu que ça me prendrais des plombes pour tout expliquer et c’est là que j’ai eu l’idée de faire des ateliers de formation à distance, mais faute de succès, j’ai pour l’instant abandonné l’idée.
A+
Roland
2 « J'aime »
Bonsoir Jean,
C’est juste en ce qui concerne le fait que la CS3 ne sait pas où ce trouve une locomotive, par contre il est tout à fait possible de gérer, dans une certaine mesure, le déplacement des locomotives en ayant au préalable définit un itinéraire (enchainement d’événements). Je peux dire ma locomotive va du point A au point B tout en respectant un certain nombre de conditions (les contacts entre le point A et le point B sont-ils libres, les aiguillages sont-ils tournés dans le bon sens, etc). C’est le but recherché sur mon réseau de démo. Par contre, comme je l’ai dit plus haut dans un autre message, ça peut devenir très fastidieux, car il faut gérer un certain nombre d’événements pour une locomotive donnée (la locomotive X va du point A au point B, la locomotive Y va du point A au point B, etc) par contre, la détection des contacts de rétro, la position des aiguillages (tout ce qui est infrastructure) peuvent être mutualisés sans problème.
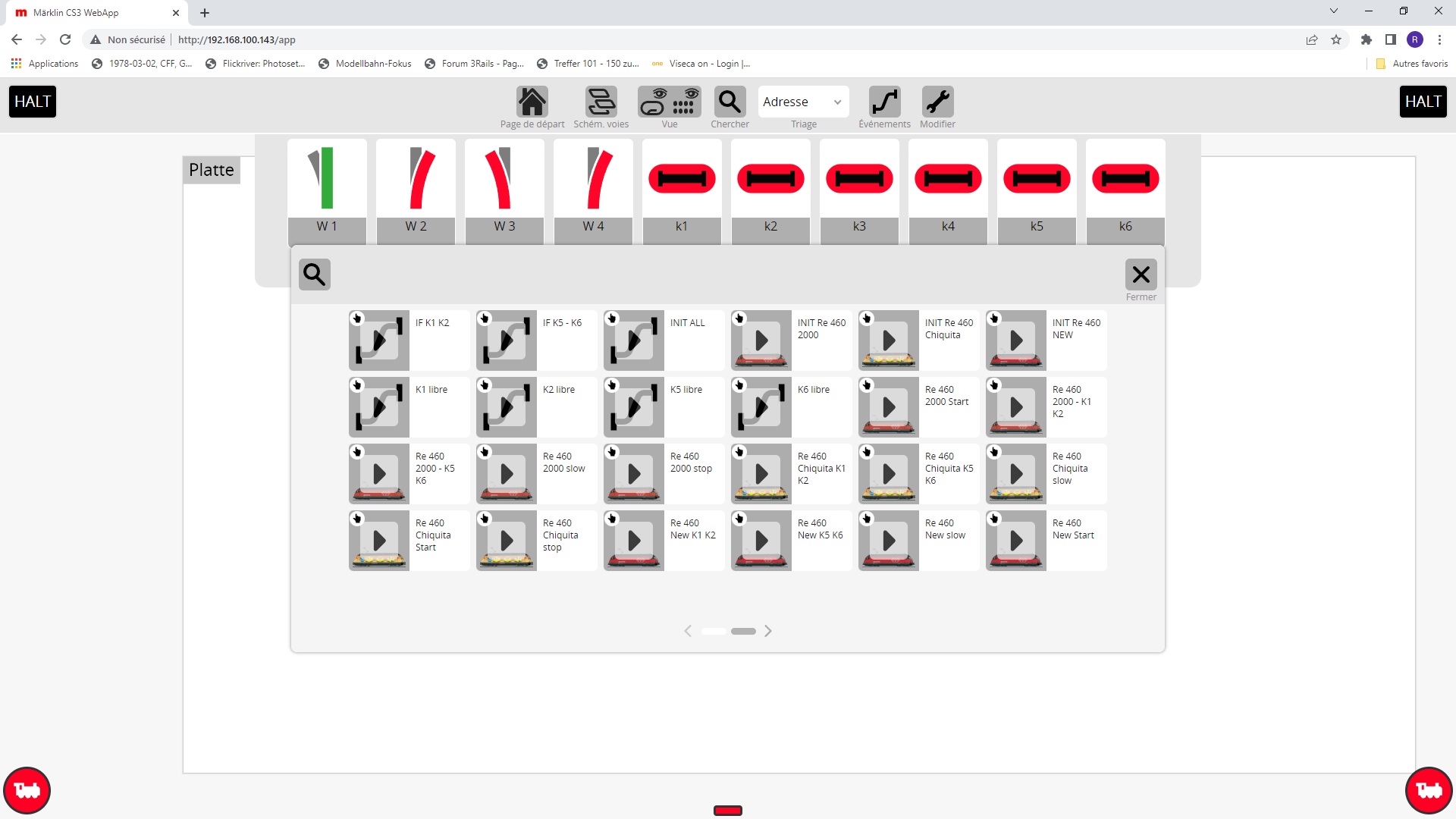
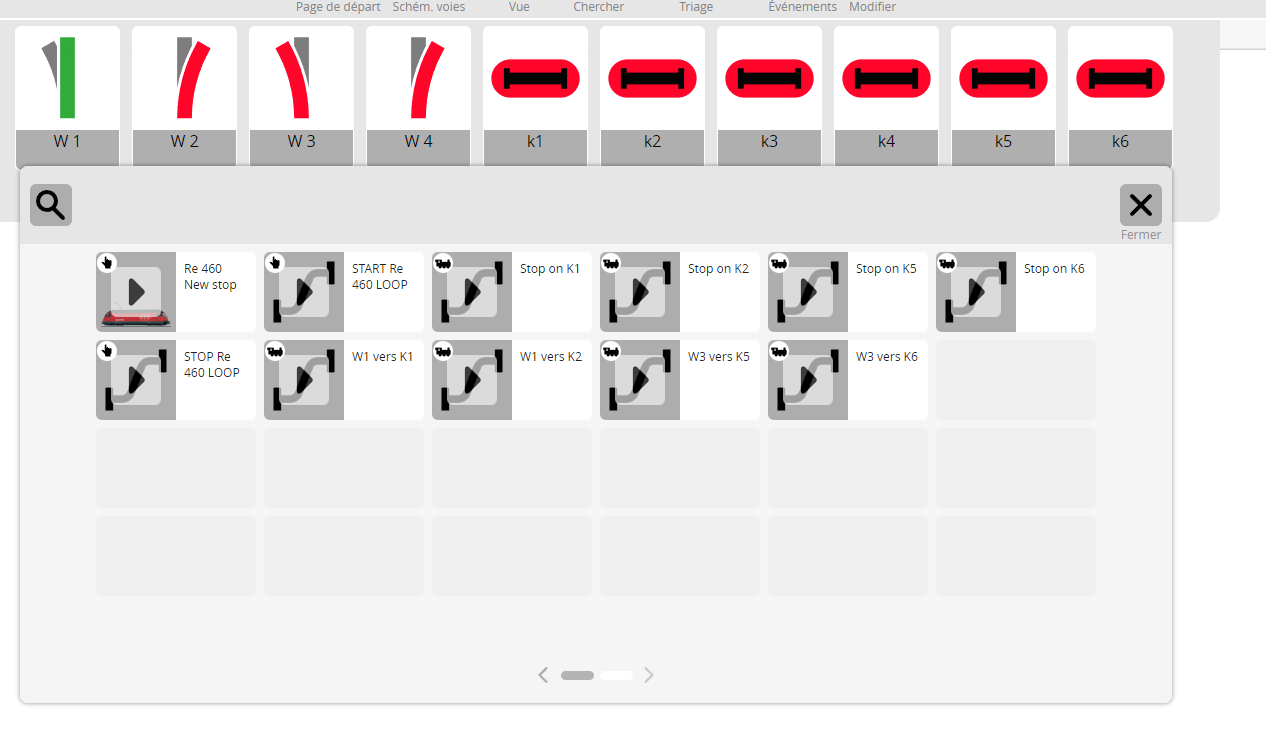
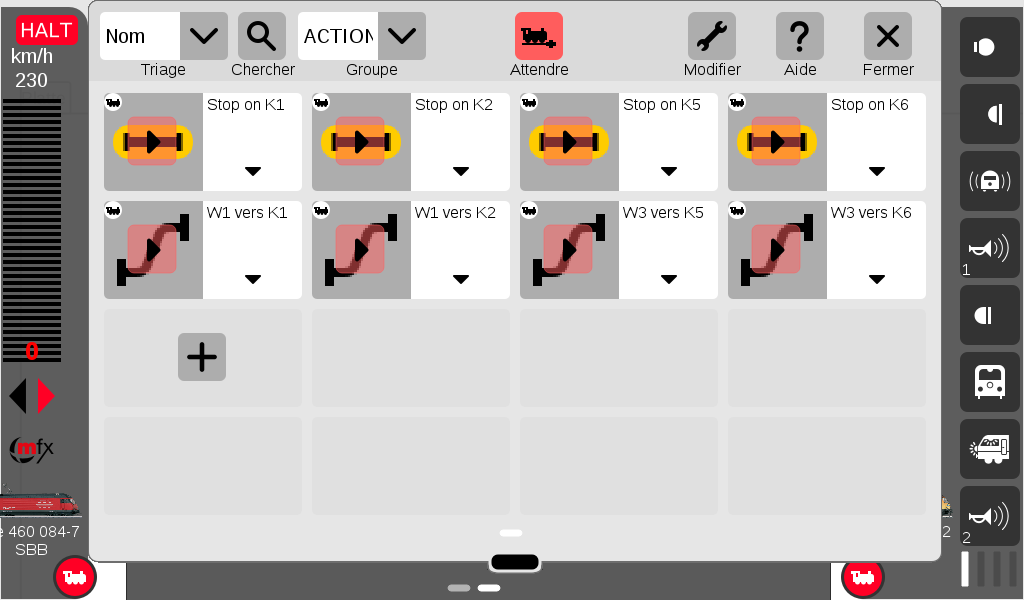
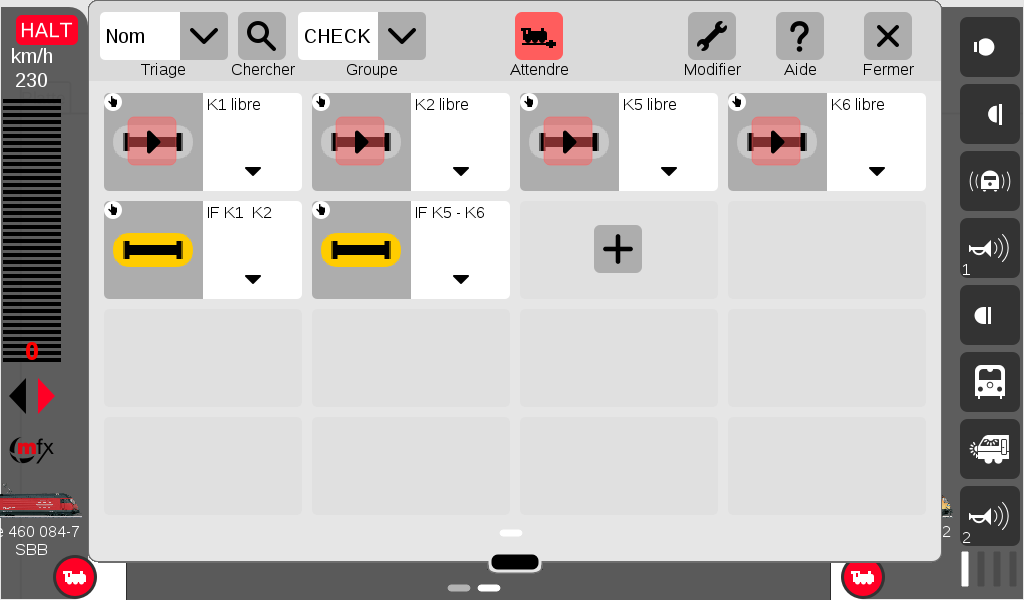
Voici en images:
Les actions
Les contrôles
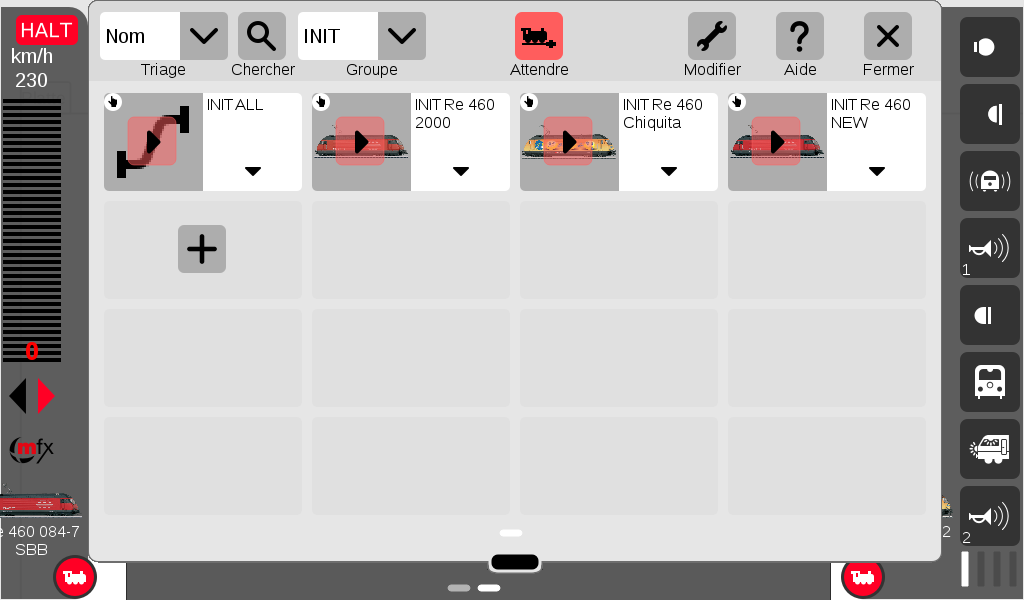
L’initialisation du réseau de démo et des locomotives (remise de la vitesse à 0, sens de marche, fonctions, etc après un arrêt de la centrale)
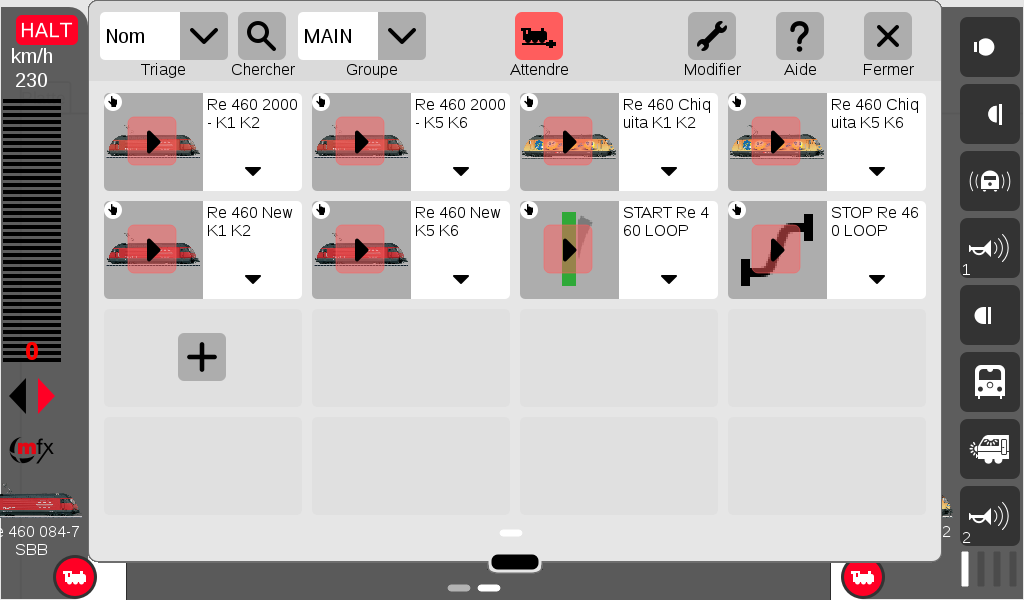
Les itinéraires (par locomotive)
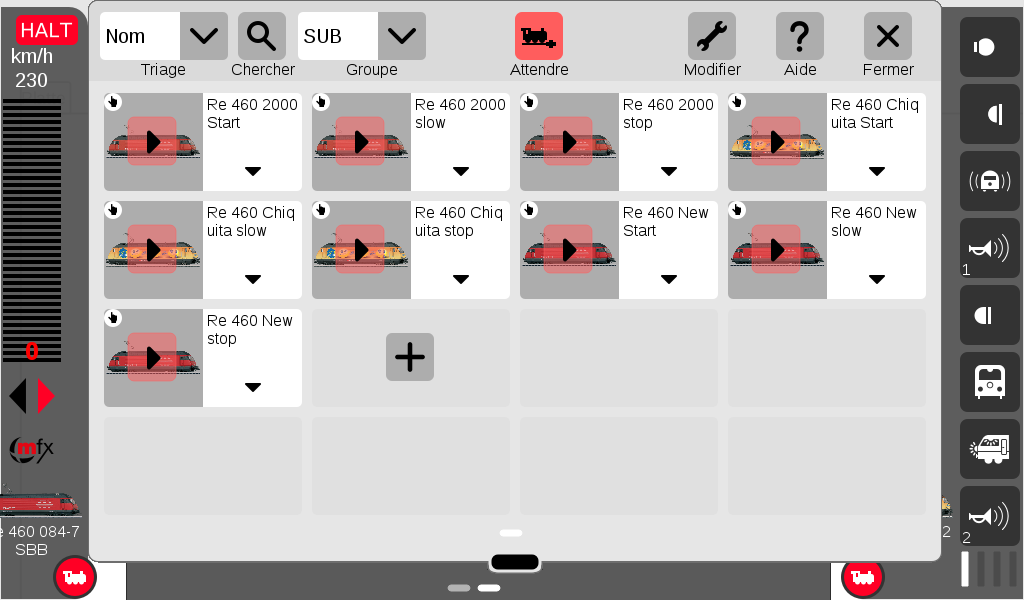
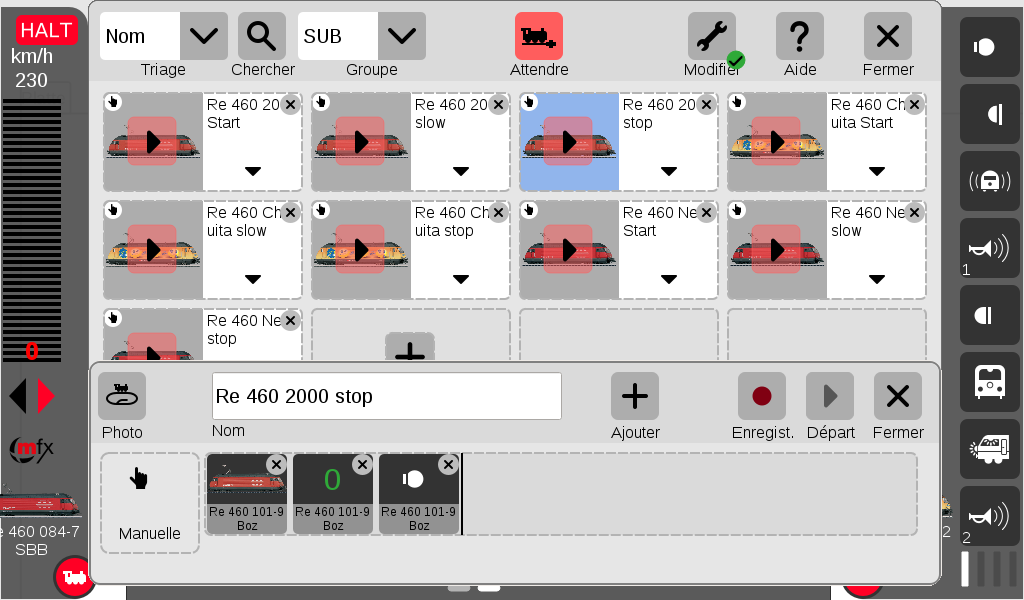
Les mouvements par locomotive (démarrage/accélération, ralentissement, arrêt)
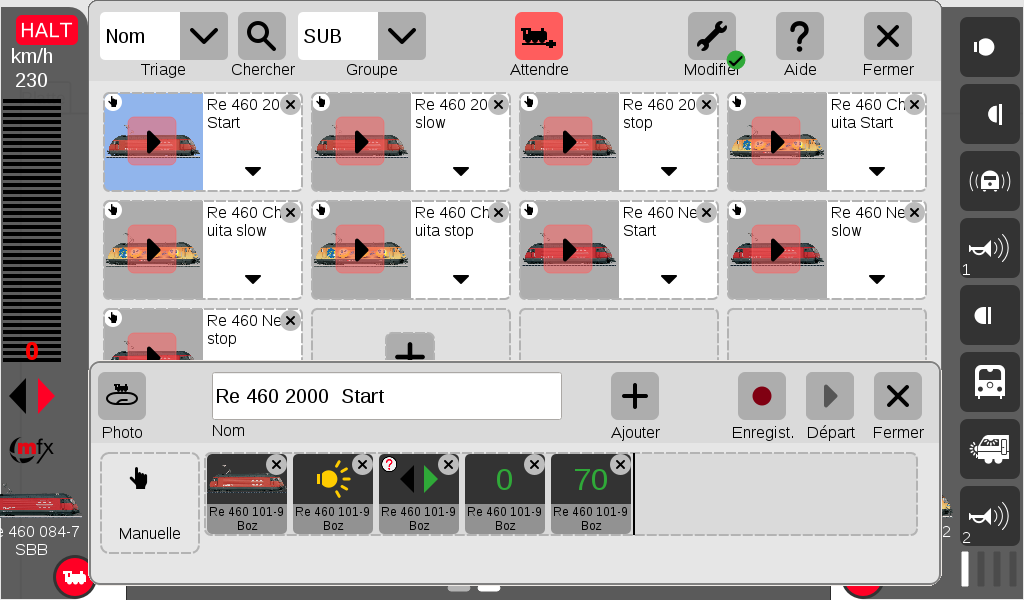
Remarques: je ne vais pas détailler chaque événement, ni en expliquer le fonctionnement, mais voici quelques exemples:
Démarrage et accélération de la Re 460 2000:
Ralentissement de la Re 460 2000:
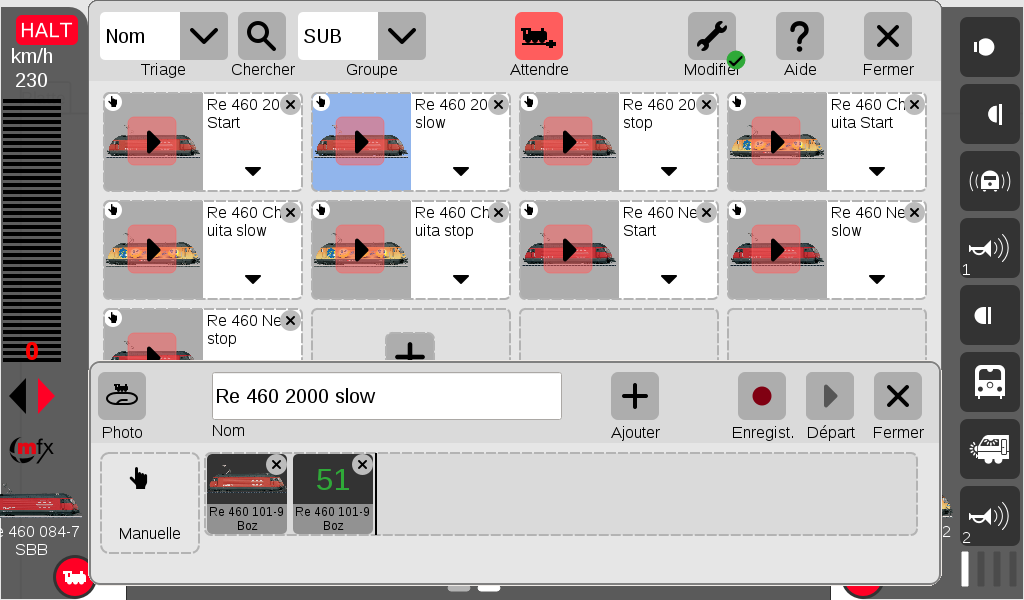
Arrêt de la Re 460 2000:
Itinéraire de la Re 460 2000 du contact 1 ou 2 vers le contact 5 ou 6 (en fonction de celui qui est libre)
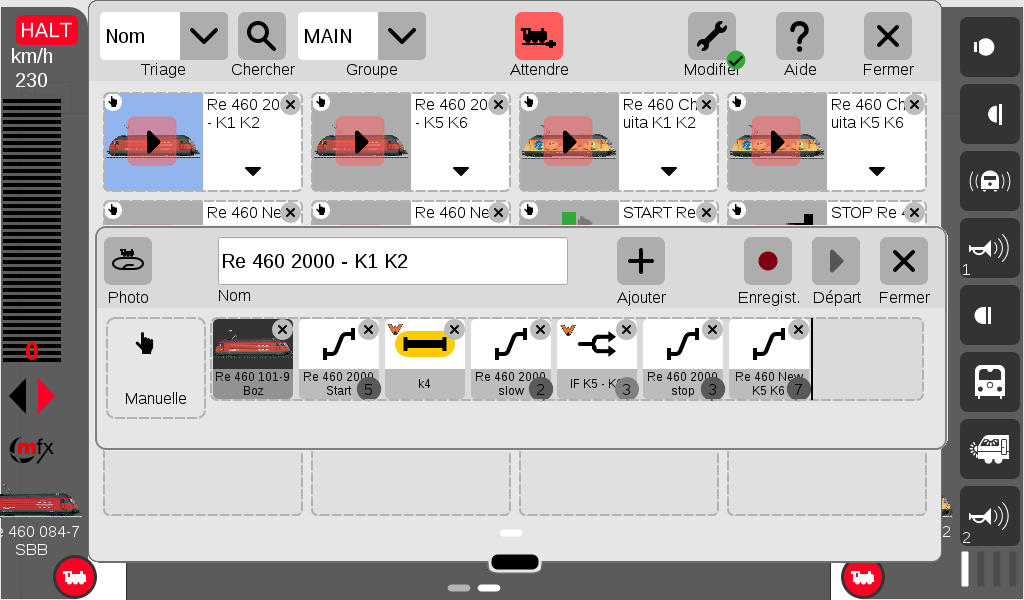
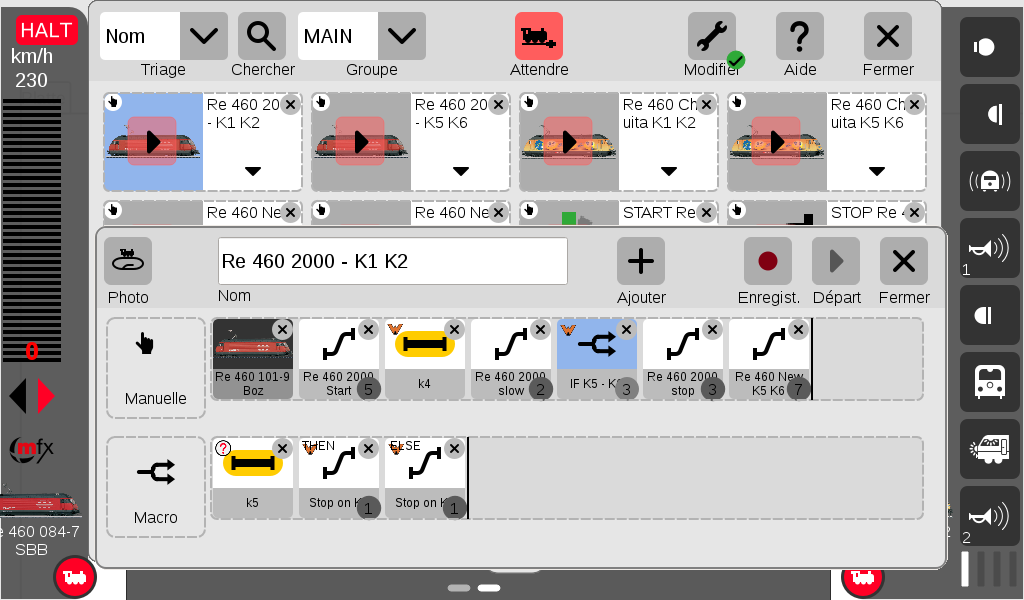
Dans cet exemple, 3 locomotives circulent à tour de rôle du contact 1 ou 2 au contact 5 ou 6, s’y arrêtent, puis reviennent au contact 1 ou 2 en fonction de la voie qui est libre. A chaque entrée sur un des contacts ci-dessus, la locomotive qui se situe sur la voie parallèle démarre à son tour jusqu’au point de contact d’arrêt suivant.
C’est évidemment bien moins souple qu’avec un logiciel de pilotage et difficilement exploitable sur un grand réseau avec beaucoup de locomotives, mais on peut faire des choses sympa et ça peut être une bonne approche pour passer par la suite à un logiciel de pilotage pour celles et ceux qui seraient un peu réticent (voir pas du tout intéressé) à s’y lancer ou par peur de la complexité de ces logiciels.
A+
Roland
2 « J'aime »
Merci a vous 2 !
Très clair ![]()