Très intéressant,ça pourrait être une solution pour s’assurer que l’arrière des trains à bien dégagé la zone d’aiguillage à l’entrée d’une gare cachée.
Les détecteurs sont basés sur du matériel que l’on trouve principalement en Chine et que j’assemble.
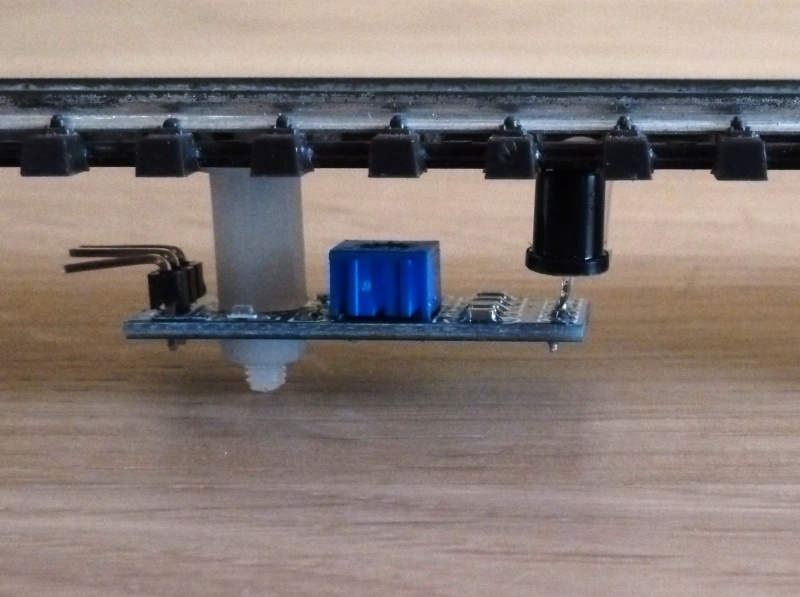
Il existe sur le marché des capteurs utilisés sur les robots pour éviter les obstacles ou suivre une ligne blanche. J’ai fait des essais en plaçant le capteur sous la voie, entre deux traverses. En réduisant, à l’aide du potentiomètre, la distance au minimum, on détecte le passage du train. On améliore le résultat en collant une petite étiquette blanche sous la loco.
La voie M est exclusivement utilisée dans la gare fantôme. Il est impossible d’installer un capteur IR sous la voie. De plus, si on le monte à la verticale le long de la voie, on est souvent perturbé par le détecteur d’à côté.
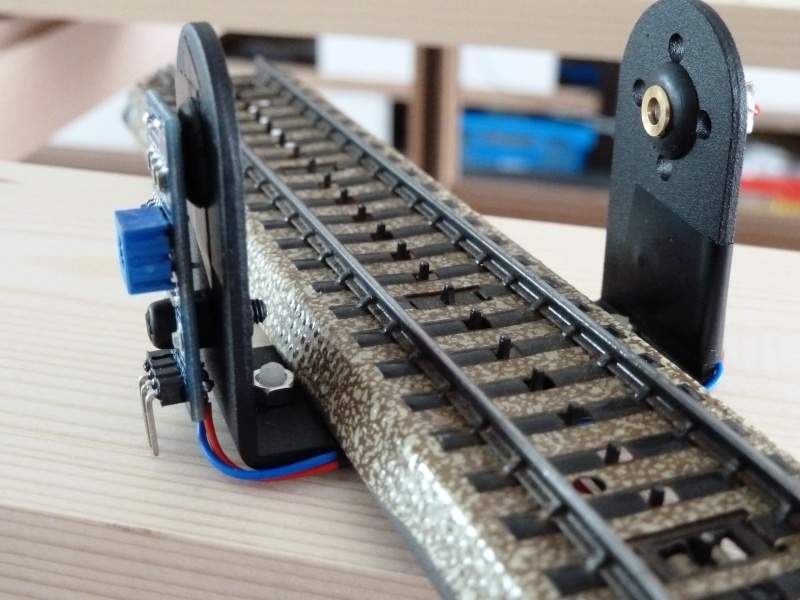
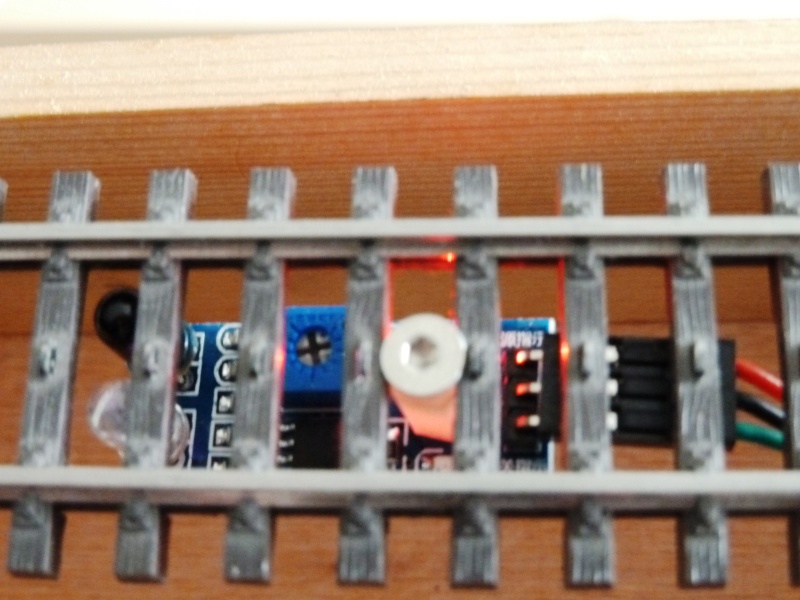
Pour cette raison, j’utilise un petit émetteur laser qui pointe sur un capteur LDR et un comparateur de tension LM393. On trouve sur Internet des petits modules qui sont également utilisés dans les robots.
Etant donné que le côté esthétique importe peu dans la gare fantôme, le laser et le module LDR sont montés sur un étrier habituellement utilisé dans des supports PTZ de servo-moteurs de mini-cameras.
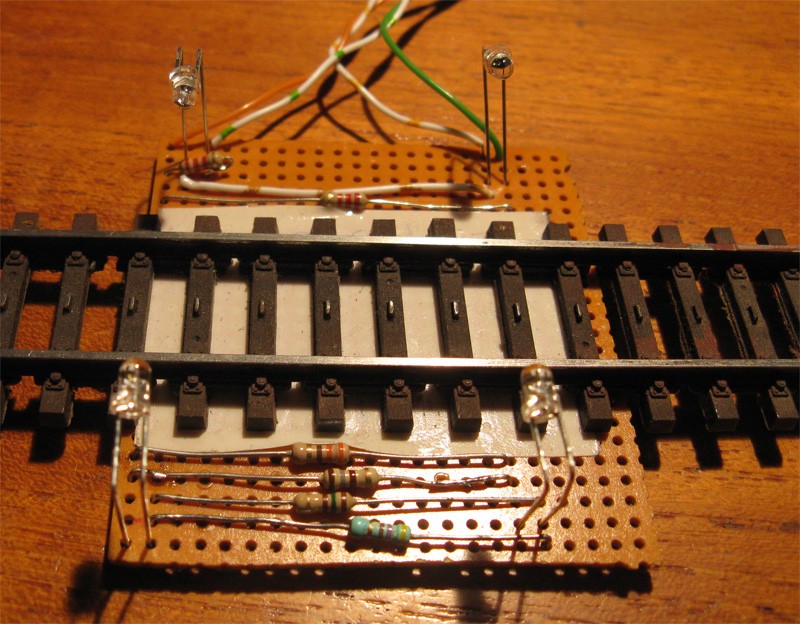
Il y a plusieurs années j’avais fait un montage pour calculer la vitesse des trains en mesurant le temps de passage entre deux barrières optiques à l’aide d’un microprocesseur.
Pour les barrières optiques j’avais utilisé de bêtes diodes IR et des phototransistors.
Le prototype fonctionnait très bien, mais je n’ai jamais mis le montage au propre, il est parti au fond d’un tiroir.
Actuellement je reprends la même idée pour mon réseau à l’échelle N.
J’ai commencé par un montage qui intègre la barrière optique à un module de freinage
Sur la video ci dessous on voit un premier passage au rouge avec freinage, puis une marche arrière et un passage au vert sans freinage (juste un arrêt brutal en fin de section), puis un second passage au rouge avec freinage.
La prochaine étape (en cours d’étude) est un module qui intègrera 8 ou 16 barrières optiques et un module S88 spécifiquement conçu pour les barrières…
Quel est le rôle des S88 dans le calcul des vitesses?
Si le montage à micro-controller fait office de chronomètre et enregistre le délai entre chaque rupture des 8 à 16 faisceaux infrarouge, nous aurons une grande précision. Cette info pourra être transférée off-line vers un PC (dans un fichier excel, par exemple). Nous aurons donc tous les éléments pour déterminer une courbe de freinage.
Si c’est pour faire un étalonnage de la vitesse réelle de la loco pour une consigne de vitesse constante (nombre de crans de vitesse), je suppose que deux faisceaux IR sont suffisants?
Par contre, je ne comprends pas comment faire du traitement temporel avec des S88.
Le temps de cycle entre le moment où une info venant de la lecture du registre à décalage S88 et le moment de son traitement effectif dans l’ordinateur est imprécis. Plusieurs centaines de millisecondes. Très fluctuant. Quelle est votre idée?
1- il y a 3 ou 4 ans j’ai fait un montage avec un microprocesseur, 2 diodes IR et 2 phototransistors … il n’y avait pas de S88 … grâce aux barrières optiques le microprocesseur détectait le passage des trains et calculait la vitesse qu’il renvoyait à un PC via un port USB; j’utilisais un PIC18F2550 qui intègre un port USB. Cela fonctionnait très bien et c’était très précis …
Mais comme je fais cela juste pour m’amuser et que je n’avais pas de réseau, je ne suis pas allé plus loin…
2- Récemment j’ai voulu voir comment fonctionne le freinage par tension continue, j’ai donc fait un montage intégrant aussi un microprocesseur et une barrière optique pour gérer le module de freinage… il n’y a toujours pas de S88 … … le module de freinage fonctionne bien mais là aussi je ne suis pas allé plus loin; c’était juste pour comprendre et voir comment ça marche.
3- Et maintenant je suis en train d’étudier un module S88 qui aurait 8 ou 16 entrées connectées chacune à une barrière optique, c’est juste un montage pour détecter le passage des trains en entrée et sortie de cantons … Au lieu de faire de la détection par contact ou par consommation de courant je fais de la détection par barrière optique. L’idée est de faire un module S88 spécialement conçu pour avoir à ses entrées des barrières optiques et les gérer de façon à ce que les diodes émettrices ne soient alimentées qu’au moment de la lecture afin de réduire la consommation électrique du montage.
C’est en cours de réflexion, mais d’autres occupations bien plus importantes font que cela n’avance pas …
A la place des diodes IR et phototransistors, j’ai aussi essayé un CNY70 installé entre les traverses; c’est un détecteur qui inclut l’émetteur et le récepteur et fonctionne par réflexion.Cela fonctionne très bien aussi mais c’est un peu sensible à la lumière ambiante, on arrive à immuniser le montage en pulsant le signal émis à une fréquence connue et en filtrant le signal reçu. Finalement je suis resté aux diodes IR et phototransistors pour le moindre cout.
Bonne journée
Jean-Louis
PS : j’ai aussi fait un montage pour gérer une boucle de retournement, mais ça je n’en ai pas parlé parce qu’en 3 rails c’est inutile
OK, c’est clair
Finalement, notre approche est la même. Les différents détecteurs que je présente sont reliés à des S88.
En son temps, j’avais également fait des essais avec toute une série de détecteurs bon marché tels que le Vishay TCRT5000, le Vishay CNY70, le Rohm RPR220, le Sharp GP2Y0D810Z0F et d’autres… J’ai finalement opté pour le petit module IR que je présente plus haut.
Pour éviter les perturbations, tout l’éclairage de la pièce est assuré par des spots LED. L’éclairage dans la gare fantôme se fait par LED STRIP. Les halogènes sont proscrits.
D’autre part, pour limiter la consommation des émetteurs laser, j’étudie la possibilité de les activer seulement quand on en a besoin c-à-d au départ et à l’arrivée d’un train sur une voie de garage. Un relais K84 (ou un autre bon marché piloté par un arduino mega 2560) pourrait allumer ou éteindre l’alimentation du montage. Ce relais serait activé dans le déroulement de l’itinéraire géré par iTrain. Mais c’est à l’étude. Je (re)découvre iTrain depuis fin mars.