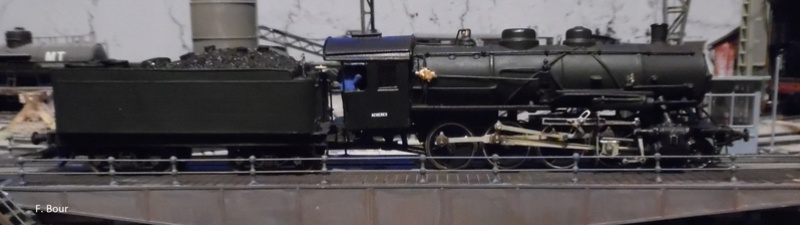
Ravi de voir que le projet touche au but avec ce premier essai de roulage. C’est curieux que deux Lokpilot micros aient brulés. La consommation de la motorisation est peut être trop élevée pour ce type de décodeur, surtout à la mise en route, avec probablement quelques points durs avant rodage.
Reste certainement à ajuster les paramètres du décodeur au moteur afin d’obtenir la souplesse de fonctionnement notamment au ralenti, arrêt et démarrage, ce qui n’est pas évident avec ce type de décodeur plus délicat à ajuster qu’un Lokpilot par ex.
Bon courage pour la suite et fin qui n’est pas loin maintenant !
Merci Yann.
Le premier Lokpilot-micro a cramé lors du changement de sens avec un transfo analogique gris 6647, mais il avait probablement déjà forcé avec quelques points dur de la motorisation.
Pour l’ajustement des paramètres du décodeur, je vais sûrement rester “basique”.
Merci Olivier.
Il faut surtout un grosse dose de patience et de “zenitude”, ainsi qu’un bon répertoire de jurons.
Le reste n’est pas aussi compliqué que cela en a l’air.
juste pour éviter d’autres “grillades” : le Lokpilot Micro n’est pas apte au fonctionnement courant alternatif avec inversion de la marche par surtension - il est fait pour un fonctionnement analogique seulement sous courant continu !
Je suppose que les composants ne sont faits que pour 30V= (miniaturisation oblige), et avec 24V~ Ueff, ce qui correspond à près de 34V= Umax, il est “cuit”.
Bonjour Wolfram.
C’est possible que le Lokpilot accepte mal l’inversion de sens par surtension, mais j’en ai installé déjà plusieurs qui fonctionnent correctement.
J’attend toujours le plaques ETAT pour terminer la remise en service.
Bonne fin de journée.
je ne parle pas du Lokpilot en général (seul la version DCC sans MM n’accepte pas l’analogique c.a.), mais du Lokpilot Micro, dont la notice dit clairement qu’il est capable à fonctionner en analogique courant continu (Gleichstrom).
{kind=link}
{kind=link}
{kind=link}
{kind=link}
{kind=link}