Bonjour, je viens de me lancer dans la conception et la réalisation d’un ascenseur (1m x 1m sur 6 niveaux) pour mon circuit de train.
Matériel : moteur Neima23 + Driver + Arduino 2560 + montants + rails + …
La partie logicielle est bien avancée (gestion avec joystick) mais je suis un peu “bloqué” par la partie “Alu”.
Je suis à la recherche de :
6 cornières alu de 1m en 50 mm x 30 (ou 25mm, mais pas moins en raison des dimensions de mes rails linéaires) et en 2mm d’épaisseur.
2 Plats alu de 1m en 40 ou 50mm et 2mm d’épaisseur.
Ici, chez moi, je n’en trouve pas et je suis assez “effaré” par les prix proposés sur internet.
Si vous avez de bonnes adresses, je suis preneur car c’est juste ce qui me manque.
D’avance merci.
Bon, beaucoup de retard car vacances (des petits enfants …), une bonne allergie aux pollens et surtout des pièce de chez AliExpress (merci de supprimer le 7 dernières lettres) : un article non conforme, un autre qui n’a pas pu être livré (mon adresse introuvable à … Hong Kong !!!), un autre en cours de livraison (depuis plus de 4 semaines), etc. etc. et donc je n’ai pas toutes les pièces. En attendant tests avec ce dont je dispose … et quelques modifs envisagées. Mais dans l’ensemble ça marche et même bien.
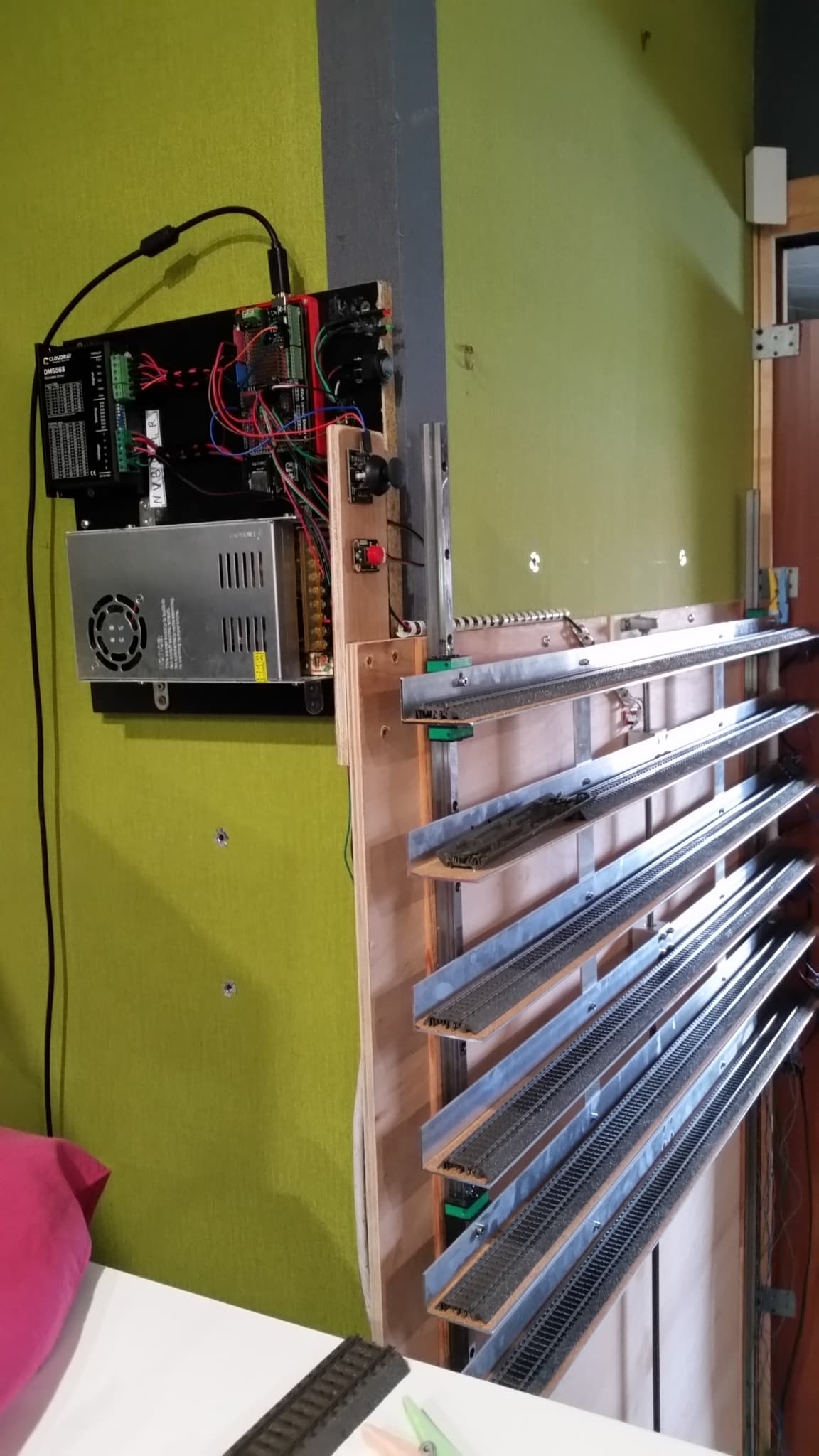
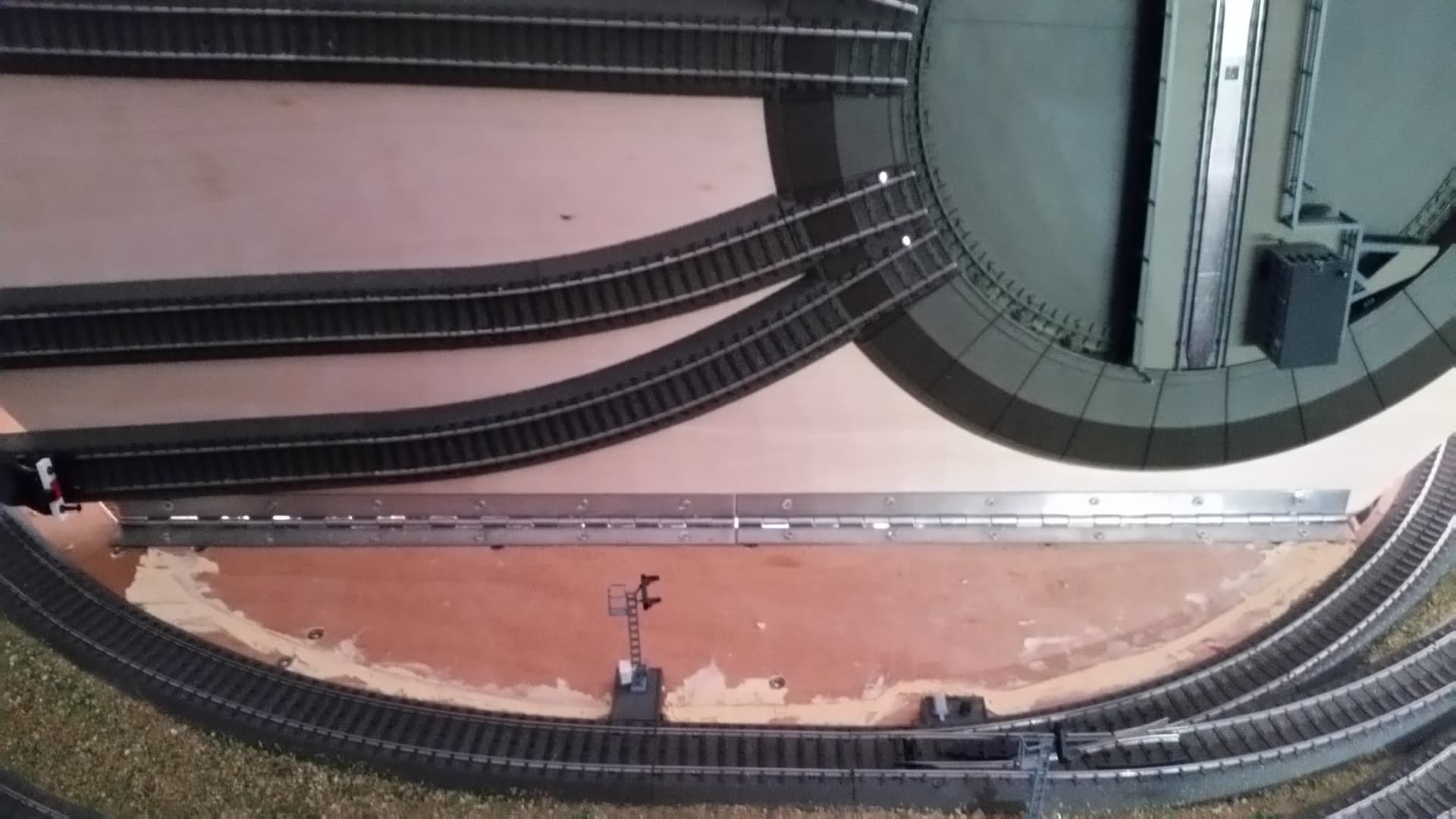
Le support vient de rejoindre son emplacement au mur (il manque encore 3 traverses horizontales de rails). Cela fera donc 9 voies simples de 1m de long. Ca me suffira amplement (pour le moment ). Je pense qu’il faudra remplacer les 2 montants verticaux (pas les rails à glissière) par de l’alu un peu plus épais (2 ou 3 mm au lieu du 1 actuel) pour supprimer quelques vibrations.
La partie motorisation est bonne mais je pense qu’un emplacement moteur en haut plutôt qu’en bas de la tige filetée sera plus efficace. Tests à faire.
Au niveau commandes (Arduino) c’est bon aussi : vitesse rapide, vitesse lente (très lente) en approche de la voie de sortie et contacts de fins de course (limite haute et limite basse, pour ne pas sortir des rails) OK.
Je vais aussi attaquer le pupitre de commande (3D).
A ce jour (pièces manquantes comprises), j’estime le prix de l’ensemble à mois de 300 euros. Donc dans les clous fixés.
Mais pas de date précise sur l’utilisation finale
salut
un ascenseur sur 6 niveaux ! intéressant
pour un pont transbordeur : quel est je jeux entre les rails ?
pour l’ascenseur : quel sera le jeux entre les rails et comment le réduire pour être dans les normes du transbordeur
de plus l’alignement dans le “3 dimensions” : bref il faudra être soigneux avec des guides et des buttées auto-serrantes peut-être utiliser des éclisses pour les rails !
merci
P
Bonjour, 1) “pour un pont transbordeur : quel est je jeux entre les rails ?” : je ne peux répondre car je n’ai pas un tel article (je pense que cela doit être spécifié dans la doc? 2) " pour l’ascenseur : quel sera le jeux entre les rails et comment le réduire pour être dans les normes du transbordeur" : désolé mais je ne comprends pas bien la question. Au cas où, la hauteur entre 2 voies, pour mon ascenseur, est de 10 cm.
3) Je fais un ascenseur “perso” donc le plus simple possible. Pour le moment, j’ai 2 contacts de fin de course (1 pour le haut et 1 pour le bas). Après étude, je reste sur les 6 niveaux de base, dans un premier temps.
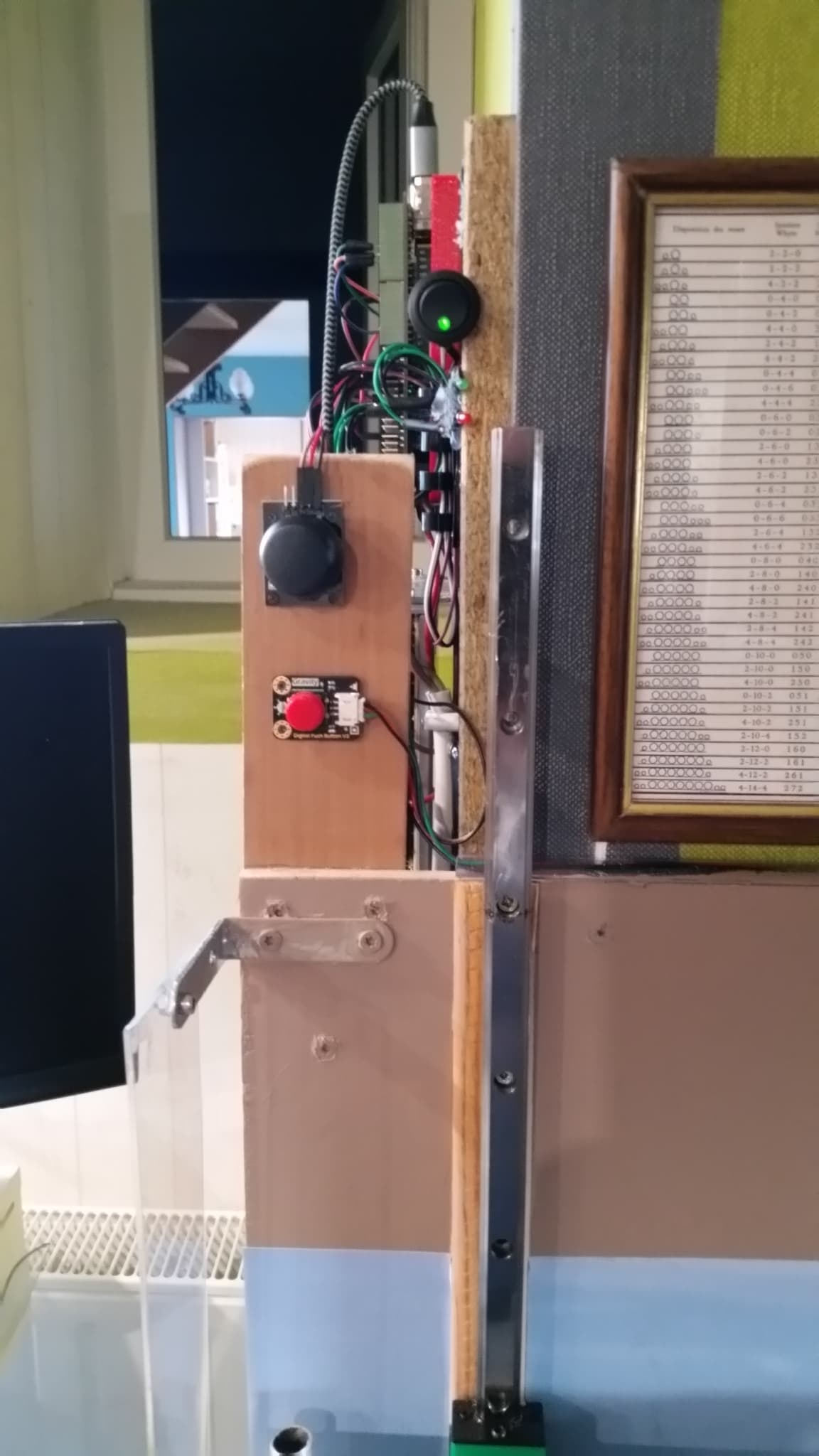
J’ai monté un bouton-poussoir qui me permet (quand il est activé) d’effectuer un déplacement vertical à très (très, très) petite vitesse, ce qui me permet un arrêt sur la voie d’entrée/sortie avec un alignement (hauteur) “quasi parfait”. Les déplacements sont contrôlés par un mini joystick Arduino.
J’envisage de travailler, plus tard, sur un arrêt “automatique” devant la voie désirée, à l’aide de contacts optiques.
J’envisage aussi une sélection via un affichage (écran/clavier) toujours avec Arduino. … et je pense que ce sera bien
Comme tout est géré par Arduino, cela ne devrait pas être d’une très grande difficulté. Du moins, j’espère
Je suis toujours en attente de quelques pièces “anti vibrations” (dont un écrou laiton) et la voie d’entrée/sortie n’est pas encore fixée (ainsi que les rails sur l’ascenseur, … mais ça avance).
salut, ce que je me demande ce n’est pas la différence entre deux niveaux, mais c’est au sujet de la précision qu’il faut avoir une fois l’ascenseur en position entre les rails de l’ascenseur et les rails fixes
merci
P
OK, pour moi, plus d’un 1.5mm n’est plus acceptable. J’ai toute ma partie pont tournant qui est montée sur une trappe de “visite” qui pivote sur une charnière longue (40 cm) et la partie jonction ne pose aucun pb. Par contre, comme je suis en voie C, je dois faire une coupe nette sur les rails de jonction.
C’est ce que je vais aussi appliquer (découpe nette des rails de jonction) pour mon ascenseur (pour rester dans l’idée du “plus simple et du plus économique”).
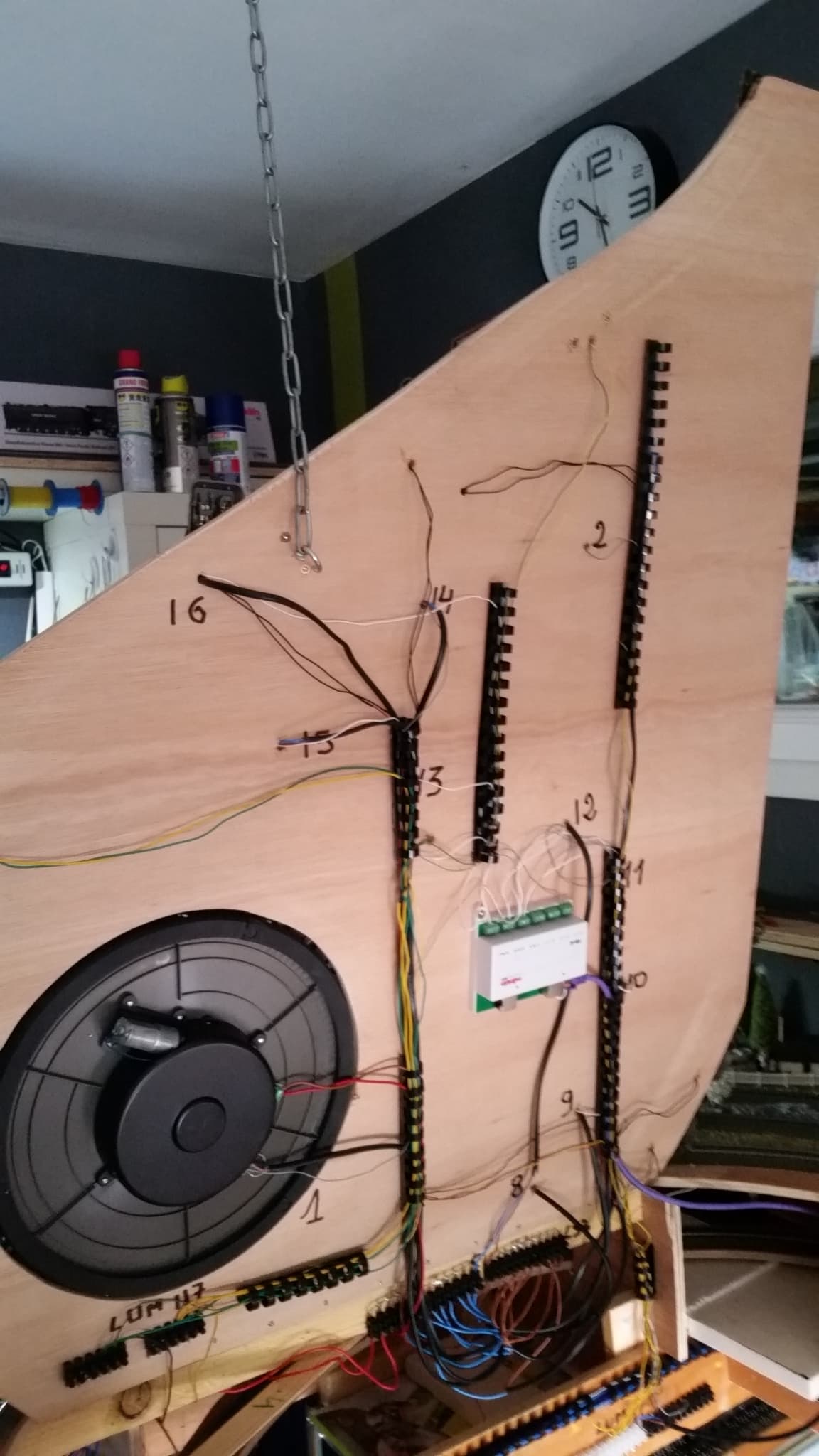
Branchement électrique des voies, branchement et vérification des rétro signalisations.
… et une petite vidéo à suivre … mais toujours en attente de pièces indispensables (réduction bruit et surtout vibrations), et le caméraman tremble beaucoup plus que l’ascenseur relativement très stable
Il me reste aussi à réfléchir à la représentation d’un tel article dans un logiciel de gestion de train (pour moi, iTrain) afin de pouvoir automatiser les départs/arrivées.
Si quelqu’un a déjà fait ça ou une idée, je suis preneur.
Cdt.
JiPé44
Après quelques semaines de tests, une petite vidéo de l’avancée des travaux.
Avant tout, je suis tout seul pour filmer avec mon tel, donc ça (je) tremble (ce n’est pas mon ascenseur ).
Une idée de la manip :
activer le moteur pas à pas (Bouton vert)
utiliser le mini joystick pour la montée/descente
amener la voie désirée au plus près de la voie d’entrée/sortie
si nécessaire utiliser le déplacement “très petite vitesse” (bouton rouge) pour “peaufiner” la mise à niveau des rails. Personnellement, après quelques jours de prise en main je ne me sers quasiment plus de cette possibilité. L’arrête est correct au premier coups.
J’ai tenté la programmation pour un déplacement automatique, (clavier/écran arduino) mais les temps de calcul bouffent un peu trop de “temps machine” et les déplacements moteur deviennent trop lents.
J’ai tenté aussi un arrêt automatique par opto coupleur mais l’intérêt gagné n’est pas non plus intéressant.
Mais si un spécialiste “Arduino” veut bien tenter, … je suis particulièrement intéressé
Je suis resté donc dans une configuration manuelle que j’estime “très largement suffisante et opérationnelle” vu le budget alloué (moins de 300 euros).
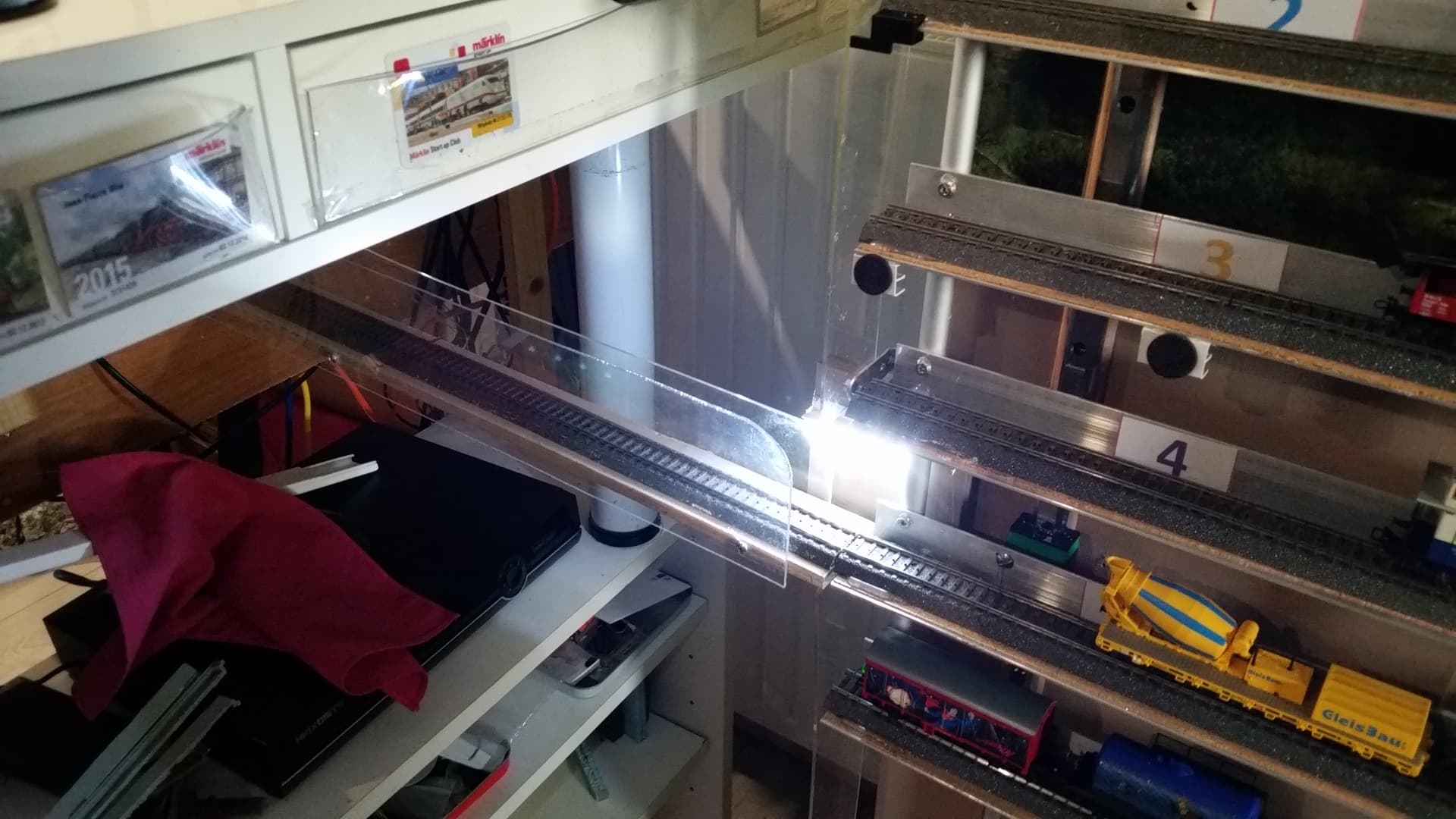
Prochaine étape : positionner 2 rails par étage. Je dois remplacer les cornières alu de 5x3 par des 10x3. Pas bien difficile. Cela permettra de positionner 12 trains de près d’un mètre.
Je vois ton sujet pour la première fois et je découvre d’un bloc la progression de réalisation. Je suis très impressionné par la qualité de l’ensemble et l’évolution.
Bien que je n’aime pas beaucoup le terme de « spécialiste », je peux t’aider pour cette mise au point du logiciel.
Je maitrise en effet la programmation des microcontrôleurs (C++) et les HMI (interfaces Homme Machine) que je réalise la plupart du temps en HTML + Javascript et qui sont dès lors utilisables sur tous les appareils comme l’ordinateur mais aussi la tablette ou le smartphone. Et je maitrise aussi les techniques de communication, WiFi, CAN, TCP etc…
Voici deux petites vidéos, la première était pour un client pour piloter un palan en maitrisant les vitesses de déplacement : https://youtu.be/Cp-oKIyeMuU
La seconde, pour mon réseau, pour régler les butées des servomoteurs et leur vitesse de déplacement pour actionner mes aiguilles : https://youtu.be/w7UCkEVm-Vc
J’ai aussi travaillé sur des ponts tournants en HO avec des moteurs PAP. Tu peux regarder sur ma modeste chaine Youtube, il y a quelques exemples.
D’autant que je suis à Saint-Malo et toi en Loire-Atlantique je crois, ce qui peut faciliter certains échanges au besoin.
Il faut bien sûr regarder plus en détail ta réalisation mais normalement, avec des moteurs PAP, tu dois pouvoir arriver à ta position finale en comptant simplement le nombre de tours. C’est fait pour cela. Regarde les imprimantes 3D ou les découpeuses laser dont certaines travaillent avec de amplitudes de plus d’1 mètre.
Ah je n’y ai pensé qu’après, mais la problématique du pont tournant est sans doute assez proche de ton besoin (bien que ce ne soit pas un moteur PAP).
Chaque porte de destination à son bouton sur la tablette. Le moteur accélère progressivement au départ et ralentit doucement à l’arrivée pour éviter les à-coups.
Bonjour et merci pour la proposition d’aide … que j’accepte bien sûr sans hésitation.
Complément de réponse en MP, ce qui permettra, dans un premier temps, de ne pas “saturer” ce lien du forum…
Cdt.
JiPé
effectivement même si l’aspect est différent la méthode de fonctionnement est exactement la même.
décidément les bretons sont prolifiques
ps j’habite juste entre vous deux
philippe
Ce soir, un petit plus.
Mise en place (provisoire en attendant un "cadre propre et adapté à faire en 3D) de l’écran et du clavier. Vidéo toujours aussi déplorable, je sais
saisie du niveau de départ (voie en face de l’entrée/sortie)
saisie du niveau d’arrivée (voie à présenter devant l’entrée/sortie)
affichage de la différence de niveau obtenue pour calculer la distance (ou le temps) à parcourir et dans quelle direction (en montée (positif) ou en descente (négatif)).
Il ne reste plus qu’à écrire ce programme de déplacement, … mais pas évident pour moi qui débute en arduino.(Mais bobyAndCo m’a proposé son aide, … très fortement la bienvenue).
Y a plus qu’à
Bon, j’estime ma réalisation terminée car elle me donne entière satisfaction telle quelle.
J’ai abandonné la partie clavier (la qualité arduino m’a posé des difficultés (qualité du clavier et trop grandes difficultés de paramétrages (en ce qui me concerne) entre la montée et la descente) et de plus je ne vois plus vraiment l’utilité d’une double commande (joystick et clavier/écran), la manip par manette étant largement opérationnelle et facile d’emploi.
Si cela intéresse certains, je peux mettre (autre lien) la réalisation de l’ensemble (matériel et logiciel) ou me contacter en MP, au choix. … Mais un peu de patience car il faut que je réalise cette présentation .
Puisque je disposais d’un écran, je l’ai gardé (mais aucune obligation) pour afficher quelques infos (difficile de mettre un texte 100% français en raison de la limitation des caractères (16 sur 2 lignes, sans accentuation possible) :
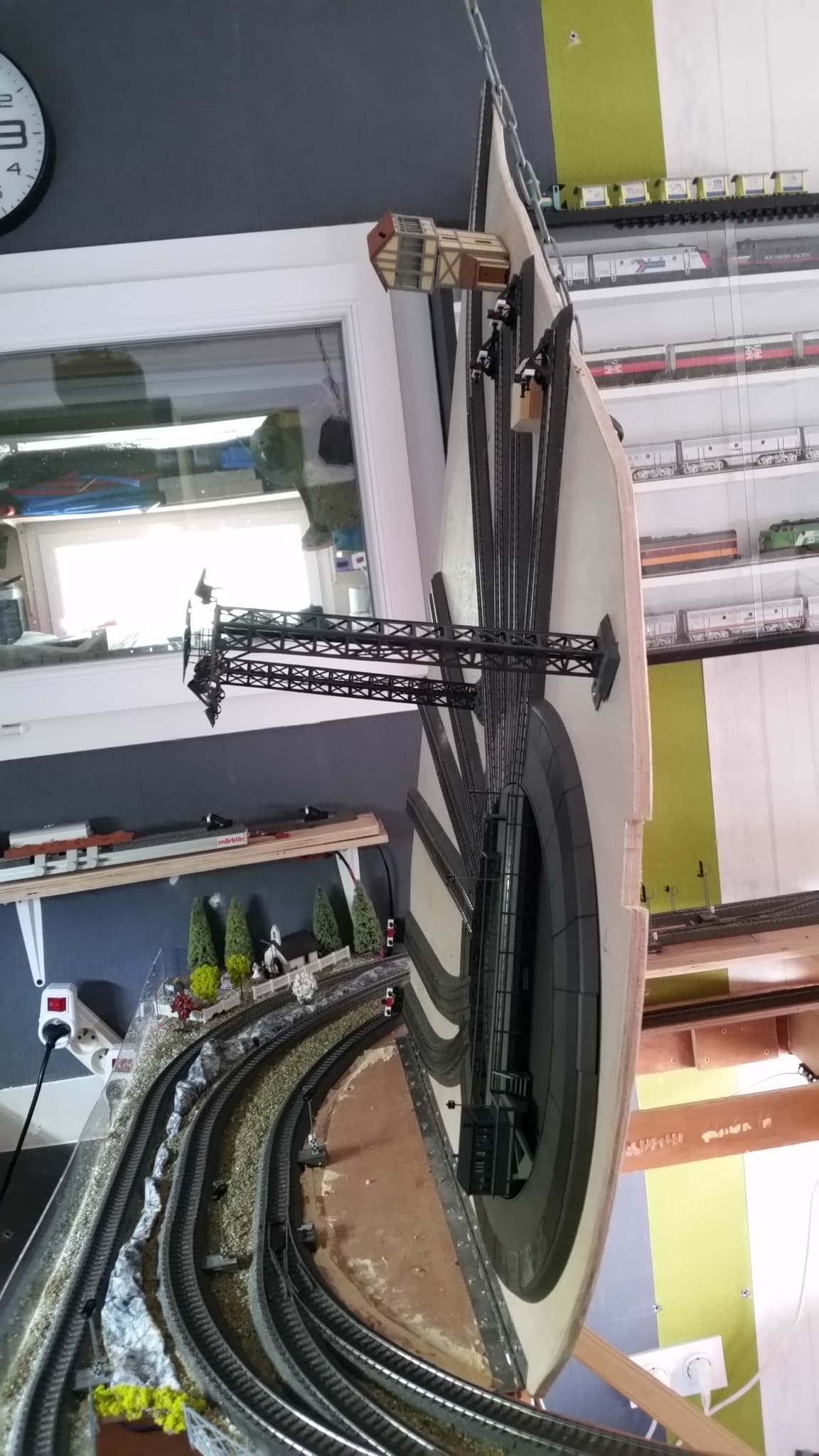
Avec la météo moins “agréable”, reprise des gros bricolages : l’ascenseur vient donc de prendre 6 voies en plus (et passe donc ici de 6 à 12 voies).
L’ensemble n’est pas terminé à 100% (renfort, protections, etc.) mais est fonctionnel. C’est bien le principal.
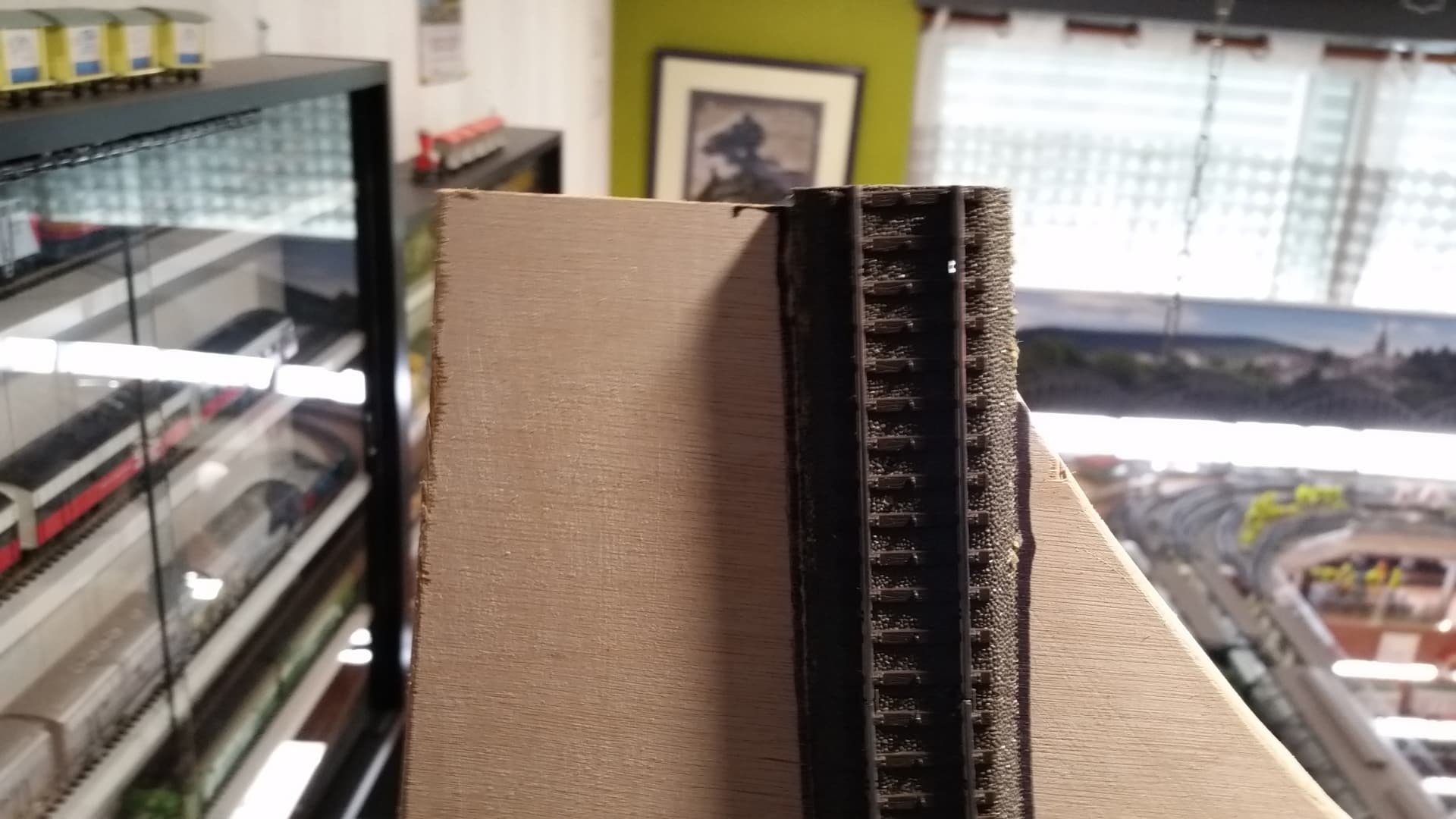
En raison du coût actuel des équerres en alu (100 x 10 x 30 en 2mm qui frôle les 80 euros) je me suis rabattu sur de la plaque en plexis (il me restait assez de chutes!!!). Les rails sont alors collés à la colle chaude : pas très esthétique, … mais très solide!