Bonjour à tous,
Je pense qu’il est temps de commencer les travaux pratique. Alain à ouvert la voie, je vais maintenant montrer (et je ne doute pas qu’il va m’accompagner) comment commencer à communiquer en CAN avec sa centrale.
Tout d’abord, il vous faut un module CAN. Pour le CAN de Marklin dont le débit est de 250 Kb/s, ce petit module à moins de 2€ fait parfaitement l’affaire :
Voici le schéma de branchement de ce petit module sur un Arduino UNO que j’ai extrait de l’article ici qui peut aussi aider à mieux comprendre de quoi on parle : https://www.moussasoft.com/module-bus-can-mcp2515-avec-arduino/
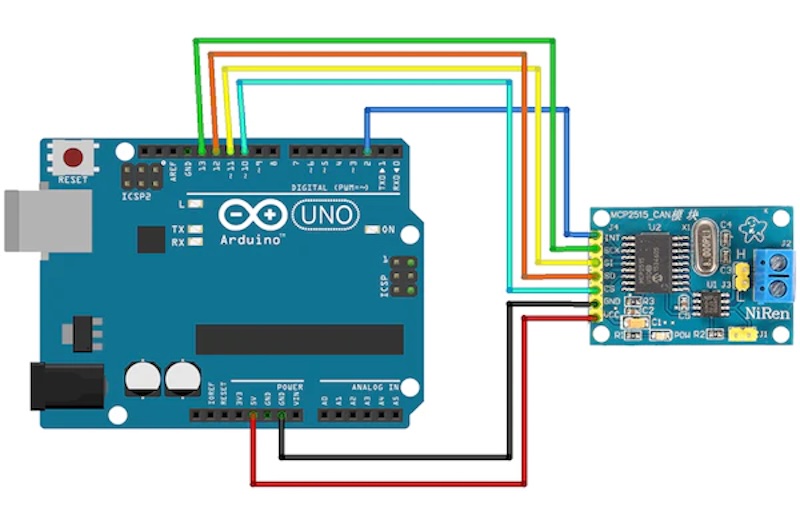
La broche VCC du module doit être connectée à la broche 5V de l’Arduino.
La broche GND du module doit être connectée à la broche GND de l’Arduino.
La broche CS du module doit être connectée à la broche 10 (SS) de l’Arduino.
La broche SO du module doit être connectée à la broche 12 (MISO) de l’Arduino.
La broche SI du module doit être connectée à la broche 11 (MOSI) de l’Arduino.
La broche SCK du module doit être connectée à la broche 13 (SCK) de l’Arduino.
La broche INT du module doit être connectée à la broche 2 de l’Arduino.
Pour la liaison du module CAN sur la Gleisbox, suivez ce qui a déjà été montré à savoir :
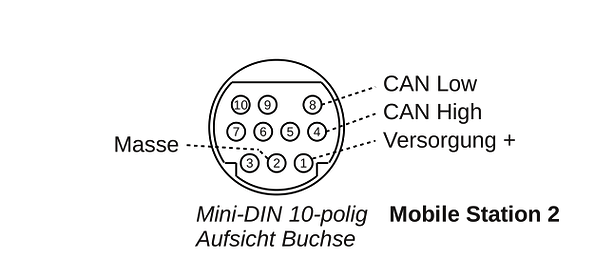
CAN-L sur pin 8 de la Gleisbox
CAN-H sur pin 4 de la Gleisbox
GND sur pin 2 de la Gleisbox
Ces branchements sont aussi valables pour les autres centrales.
Voici un programme à charger sur l’Arduino qui va nous permettre de lire tout ce que la Gleisbox envoie. Vous pouvez-même « jouer » avec la MS2 à piloter des locomotives et vous verrez avec l’Arduino les commandes envoyées et reçu en décrypter ce qui s’échange.